
Корачни мотор

Корачни мотор је врста електромотора без четкица који претвара дигиталне пулсеве струје у фиксне инкременте угаоног помјерања назване кораци.
Ова врста мотора обезбјеђује прецизно позиционирање терета, а контрола мотора се врши директно рачунаром, микроконтролером, или програмибилним логичким контролером. Због своје конструкције без четкица, корачни мотори су поуздани, издржљиви, и не захтијевају никакво одржавање.
Рад[уреди | уреди извор]

Основни рад је објашњен на сљедећи начин: Полови ротора су привучени к полу статора (фаза 1) кроз чију завојницу пролази струја. Једном тамо, струја протиче кроз завојницу пола статора (фаза 4), и пол ротора је привучен ту. Затим се активира фаза 3, па фаза 2. Циклус се даље понавља од фазе један, а угао корака је 15°.
Треба примијетити да је угао између полова статора 45° а између полова ротора 60°. Ово је потребно да се обезбиједи зазор од 15° између полова ротора и статора за идући корак. Иначе, ротор се не би покретао при идућем пулсу струје.
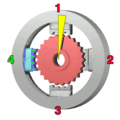
На идућим сликама приказан је рад сложенијег корачног мотора са 100 корака по ротацији, или 3.6° по кораку.
-
 Рад корачног мотора, корак 1. Електромагнет 1 је укључен. Када се полови ротора поређају са половима статора (1), долази до зазора између полова ротора и плова статора (2).
Рад корачног мотора, корак 1. Електромагнет 1 је укључен. Када се полови ротора поређају са половима статора (1), долази до зазора између полова ротора и плова статора (2). -
 Рад корачног мотора, корак 2. Електромагнет 2 је укључен. Због зазора (полови ротора-полови статора (2)), ротор се даље окреће док полови нису поређани. Сад се међутим ствара зазор полова на позицији 3.
Рад корачног мотора, корак 2. Електромагнет 2 је укључен. Због зазора (полови ротора-полови статора (2)), ротор се даље окреће док полови нису поређани. Сад се међутим ствара зазор полова на позицији 3. -
 Рад корачног мотора, корак 3. Даље се наставља, по принципу из корака 1 и 2.
Рад корачног мотора, корак 3. Даље се наставља, по принципу из корака 1 и 2. -
 Рад корачног мотора, корак 4.
Рад корачног мотора, корак 4.




Употреба[уреди | уреди извор]
Корачни мотори се користе у примјенама гдје је прецизно позиционирање од значаја. То су прецизне машине, роботи, медицинска и научна опрема, штампачи и цртачи (плотери), и старији модели рачунарских дискова.
Конструкција[уреди | уреди извор]
Корачни мотори имају статор са намотајима и неузбуђени ротор. Статор има паран број једнако размакнутих полова (зубаца, зуба), сваки са завојницом. Насупротни парови статорских завојница су спојени у серију, дакле кад је један у стању сјеверног пола, други је у стању јужног пола. Статор може да има 2,3 или 4 независна круга, или фазе, повезана са сјевер-југ паровима полова. Ротор има спољашње зупце, једнако удаљене по периферији, са малим зрачним распором између статорских и роторских зубаца.
Број зубаца ротора, статора, и број фаза на статору одређују величину корака. Ово се зове угао корака или корачни угао, и за једноставне моторе се да израчунати са:
Угао корака (корачни угао) = 360° / (број зуба ротора • број фаза статора)
За примјер, корачни мотор са 16 зубаца ротора и 4 фазе статора има угао корака од 5.6°.
Подјела[уреди | уреди извор]
Могу се подијелити на дво-, тро- и четворофазне, зависно од броја фаза. Друга подјела је на моторе са промјењивом релуктансом, перманентним магнетом, или хибрид, зависно од типа ротора. Још једна подјела је на униполарне и биполарне корачне моторе.
Корачни мотори са промјењивом релуктансом имају ротор сачињен од меког жељеза. Када струја потече кроз фазу статора, ствара се магнетски ток (флукс) који узрокује помјерање зубаца ротора (и самог ротора) тако да се поређају испод полова статора. Кад је струја помјерена у идућу фазу, ротор се окреће даље док зупци нису поновно испод полова статора. Циклус се даље понавља. Ови мотори се користе за веће углове корака, 15, 30 и 45° типично.
Корачни мотори са перманентним магнетом имају један или више пари полова сталног магнета у ротору. Користе снажне магнете са додатком ријетких земаља.
Хибрид мотори имају ротор промјењиве релуктансе са перманентним магнетом, обично у ротору. Придјев хибрид се односи на кориштење 2 извора магнетског поља - завојнице статора и перманентни магнет. Користе се за мале углове корака, обично 1.8 и 2.5°. Типични хибридни мотор има 8 полова, сваки са 5 зуба и једноставном завојницом. Ротор има два лица полова, свако са 50 зубаца. Лица полова су раздвојена са сталним магнетом, па једно лице има сјеверни пол, а друго јужни. Завојнице статора су повезане у 2 фазе, А и Б. Мотор се врти удесно ако су фазе активиране по редослиједу: +А, -Б, -А, +Б, +А, ...
Пуни корак, полукорак и микрокорак[уреди | уреди извор]
Пуни корак је нормални угао корака мотора, и ово је његов нормалан начин рада.
Полукорак је метода остварења угаоног помака мањег од пуног корака. Остварује се тако да су ДВИЈЕ завојнице мотора активне у исто вријеме, чиме се пол ротора држи у позицији између полова статора.
Микрокорак је сличан полукораку, али је сад и вриједност струје у завојници подесива, па пол ротора може заузимати велики број дискретних позиција између полова статора.
Напајање струјом[уреди | уреди извор]

Ротор мотора се помиче у инкрементима (корацима), па завојнице треба да се укључују једна за другом под контролом микропроцесора или микроконтролера. Оне укључују или искључују транзисторе путем база. Транзистори затим пропуштају пулсеве јаче струје кроз завојнице. Диоде спречавају пренапоне који би могли да униште транзисторе приликом прекопчавања.
Примјер споја за контролу униполарног корачног мотора је приказан на слици.
Спољашње везе[уреди | уреди извор]
- Увод у корачне моторе Архивирано на сајту Wayback Machine (7. фебруар 2009)
- Анимација корачног мотора
- Основе рада корачних мотора
Литература[уреди | уреди извор]
- Bateson, Robert N. to Control System Technology (1999). Introduction (6th изд.). Prentice Hall. стр. 386-391. ISBN 978-0-13-895483-3.
| Нормативна контрола: Државне |
|---|