
Кинематски пар
Кинематски пар образују два међусобно повезана тела чија су кретања у узајамној вези. То значи да ова два тела једно другоме ограничавају кретање. У класичној механици, кинематички пар је веза између два физичка објекта која намеће ограничења на њихово релативно кретање (кинематика[1][2]). Немачки инжењер Франц Роло је представио кинематички пар као нови приступ проучавању машина[3] који је омогућио напредак у односу на кретање елемената који се састоје од једноставних машина.[4]
Опис[уреди | уреди извор]
Кинематика је грана класичне механике[5] која описује кретање тачака, тела (објеката) и система тела (група објеката) без разматрања узрока кретања.[2] Кинематика се као област проучавања често назива „геометрија кретања“.[6] За више детаља, погледајте Кинематика.
Хартенберг & Денавит[7] представљају дефиницију кинематичког пара:
У питању веза између крутих тела, Руло је препознао две врсте; називао их је вишим и нижим паровима (елемената). Код виших парова, два елемента су у контакту у тачки или дуж линије, као код кугличног лежаја или диска и пратиоца; релативна кретања подударних тачака су различита. Нижи парови су они за које се може визуално приказати контакт у области, као што је код спојева игле, укрштених глава,[8][9] кугличних и утичних спојева и неких других; релативно кретање подударних тачака елемената, а самим тим и њихових веза, је слично, а размена елемената из једне везе у другу не мења релативно кретање делова као што би то било са вишим паровима.
У кинематици, два повезана физичка објекта, која чине кинематички пари, називају се „крута тела“. У студијама механизама, манипулатора или робота, ова два објекта се обично називају „везе“.
Механички систем[уреди | уреди извор]
Механички систем чине тела која су међусобно повезана везама које ограничавају слободно кретање сваког тела у систему.[10][11][12] То значи да кретање једног тела изазива кретање свих осталих тела у систему. Код робота механички систем има задатак да успостави просторне односе између завршног уређаја (шаке, алата …) и радног предмета.
Механизам[уреди | уреди извор]
Механизам је основа сваке машине, па и робота. Механизам има задатак да једну врсту кретања претвара у другу, док машина претвара један облик енергије у други. Чланови механизма су крута материјална тела од којих је састављен механизам. Водеће (погонски) чланови преносе кретање на остале чланове механизма. Сви остали су вођени (гоњени) чланови. Сваки механизам се састоји из покретних чланова (сегмената) и непокретних чланова (постоља). Ако се међусобно повежу два тела, од којих је барем једно покретно, тад настаје кинематски пар (зглоб).
Слободно тело[уреди | уреди извор]

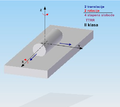
На почетку, посматрамо слободно тело.[14][15] У Декартовом правоуглом координатном систему оно може да се креће на шест различитих независних начина. То су три транслације дуж координатних оса и три ротације око тих оса. То значи да је потребно 6 независних величина (параметара) да би се једнозначно одредио положај слободног тела (три за транслаторно и три за ротационо кретање).
Број степени слободе[уреди | уреди извор]
Број степени слободе (н) је број могућих независних кретања.[16] То је број независних параметара који су потребни да би се једнозначно одредио положај тела.[17] Слободно тело има шест степени слободе, три за транслацију и три за ротацију па је н=6. Тело у кинематском пару, услед наметнуте везе и ограниченог кретања, има мање од шест степени слободе.
Класе кинематских парова[уреди | уреди извор]
Кинематски парови се деле у зависности од начина везивања и реализације веза између сегмената. Кинематске парове делимо на класе.
Класа (к) је број укинутих (поништених) слободних кретања тела услед наметнуте везе у кинематском пару. То значи да класа представља број изгубљених степени слободе. Зато се каже и да је класа допуна броја степени слободе до 6. Увек је н+к=6.
За примјену у роботици најважнији су кинематски парови пете класе. Кинематски пар пете класе дозвољава само једну ротацију (ротациони пар), односно само једну транслацију (транслаторни пар), што значи да има један степен слободе.
Поред парова пете класе, у теорији роботике користе се и други кинемарски парови.
Галерија[уреди | уреди извор]
-
 Слободно тело
Слободно тело -
 Кинематски пар I класе
Кинематски пар I класе -
 Кинематски пар II класе
Кинематски пар II класе -
 Кинематски пар III класе
Кинематски пар III класе -
 Кинематски пар IV класе
Кинематски пар IV класе -
 Кинематски пар V класе - ротациони
Кинематски пар V класе - ротациони -
 Кинематски пар V класе - транслаторни
Кинематски пар V класе - транслаторни






Референце[уреди | уреди извор]
- ^ Јосепх Стилес Беггс (1983). Кинематицс. Таyлор & Францис. стр. 1. ИСБН 0-89116-355-7.
- ^ а б Тхомас Wаллаце Wригхт (1896). Елементс оф Мецханицс Инцлудинг Кинематицс, Кинетицс анд Статицс. Е анд ФН Спон. Цхаптер 1.
- ^ Реулеауx, Ф., 1876 Тхе Кинематицс оф Мацхинерy, (транс. анд аннотатед бy А. Б. W. Кеннедy), репринтед бy Довер, Неw Yорк (1963)
- ^ А. П. Усхер, 1929, А Хисторy оф Мецханицал Инвентионс, Харвард Университy Пресс, (репринтед бy Довер Публицатионс 1968).
- ^ Бен-Цхаим, Мицхаел (2004), Еxпериментал Пхилосопхy анд тхе Биртх оф Емпирицал Сциенце: Боyле, Лоцке анд Неwтон, Алдерсхот: Асхгате, ИСБН 0-7546-4091-4, ОЦЛЦ 53887772.
- ^ Русселл C. Хиббелер (2009). „Кинематицс анд кинетицс оф а партицле”. Енгинееринг Мецханицс: Дyнамицс (12тх изд.). Прентице Халл. стр. 298. ИСБН 978-0-13-607791-6.
- ^ Р. С. Хартенберг анд Ј. Денавит (1964) Кинематиц сyнтхесис оф линкагес, пп 17-18, Неw Yорк: МцГраw-Хилл.
- ^ „Тхе Тwо Строке Цроссхеад Диесел Енгине Цроссхеад Пин анд Слипперс”. Маринедиеселс.инфо. Архивирано из оригинала 2018-10-14. г. Приступљено 2013-07-22.
- ^ „3.2.2. Пистон (реципроцатинг) цомпрессор”. Друцклуфттецхник.де. Приступљено 2013-07-22.
- ^ Мерриам-Wебстер Дицтионарy Дефинитион оф мецханицал Архивирано 2011-10-20 на сајту Wayback Machine
- ^ Реулеауx, Ф., 1876 Тхе Кинематицс оф Мацхинерy Архивирано 2013-06-02 на сајту Wayback Machine (транс. анд аннотатед бy А. Б. W. Кеннедy), репринтед бy Довер, Неw Yорк (1963)
- ^ Ј. M. МцЦартхy анд Г. С. Сох, 2010, Геометриц Десигн оф Линкагес, Архивирано 2016-08-19 на сајту Wayback Machine Спрингер, Неw Yорк.
- ^ Еллсе, Марк; Хонеywелл, Цхрис (1997). Мецханицс анд Елецтрицитy.
- ^ Сеарс; Земанскy; Yоунг (1991). Цоллеге Пхyсицс.
- ^ Мартин, Ј. L. (1996). Генерал Релативитy. стр. 3.
- ^ Пеннестрı̀, Е.; Цавацеце, M.; Вита, L. (2005). „Он тхе Цомпутатион оф Дегреес-оф-Фреедом: А Дидацтиц Перспецтиве”. Волуме 6: 5тх Интернатионал Цонференце он Мултибодy Сyстемс, Нонлинеар Дyнамицс, анд Цонтрол, Партс А, Б, анд C. 2005 АСМЕ Интернатионал Десигн Енгинееринг Тецхницал Цонференцес анд Цомпутерс анд Информатион ин Енгинееринг Цонференце. Цалифорниа, УСА. стр. 1733—1741. ИСБН 0-7918-4743-8. дои:10.1115/ДЕТЦ2005-84109.
- ^ Хале, Лаyтон C. (1999). Принциплес анд тецхниqуес фор десигнинг прецисион мацхинес (ПДФ) (ПхД). Массацхусеттс Институте оф Тецхнологy.
Литература[уреди | уреди извор]
- Вељко Поткоњак “Роботика” Научна књига, Београд 1989<реф>Поткоњак, Вељко (1989). Роботика. Београд: Научна књига. стр. 25, 28. ISBN 86-23-42022-5.
- Тугомир Шурина, Младен Црнековић “Индустријски роботи” Школска књига, Загреб 1990
- Шурина, Тугомир; Црнековић, Младен (1990). Индустријски роботи. Загреб: Школска књига. стр. 13. ISBN 86-03-99665-2.
- Френцх, А.П. (1971). Неwтониан Мецханицс. Неw Yорк: W. W. Нортон & Цомпанy. стр. 3. ISBN 978-0-393-09970-6.
- Беттини, Алессандро (2016). А Цоурсе ин Цлассицал Пхyсицс 1—Мецханицс. Спрингер. стр. вии. ИСБН 978-3-319-29256-4.
- Феyнман, Рицхард (1996). Сиx Еасy Пиецес. Персеус Публисхинг. ИСБН 978-0-201-40825-6.
- Феyнман, Рицхард; Пхиллипс, Рицхард (1998). Сиx Еасy Пиецес. Персеус Публисхинг. ИСБН 978-0-201-32841-7.
- Феyнман, Рицхард (1999). Лецтурес он Пхyсицс. Персеус Публисхинг. ИСБН 978-0-7382-0092-7.
- Ландау, L. D.; Лифсхитз, Е. M. (1972). Мецханицс Цоурсе оф Тхеоретицал Пхyсицс , Вол. 1. Франклин Боок Цомпанy. ИСБН 978-0-08-016739-8.
- Еисберг, Роберт Мартин (1961). Фундаменталс оф Модерн Пхyсицс. Јохн Wилеy анд Сонс.
- M. Алонсо; Ј. Финн. Фундаментал университy пхyсицс. Аддисон-Wеслеy.
- Гералд Јаy Суссман; Wисдом, Јацк (2001). Струцтуре анд Интерпретатион оф Цлассицал Мецханицс. МИТ Пресс. ИСБН 978-0-262-19455-6.
- D. Клеппнер; Р. Ј. Коленкоw (1973). Ан Интродуцтион то Мецханицс. МцГраw-Хилл. ИСБН 978-0-07-035048-9.
- Голдстеин, Херберт; Пооле, Цхарлес П.; Сафко, Јохн L. (2002). Цлассицал Мецханицс (3рд изд.). Аддисон Wеслеy. ИСБН 978-0-201-65702-9.
- Тхорнтон, Степхен Т.; Марион, Јеррy Б. (2003). Цлассицал Дyнамицс оф Партицлес анд Сyстемс (5тх ед.). Броокс Цоле. ИСБН 978-0-534-40896-1.
- Киббле, Том W.Б.; Берксхире, Франк Х. (2004). Цлассицал Мецханицс (5тх ед.). Империал Цоллеге Пресс. ИСБН 978-1-86094-424-6.
- Морин, Давид (2008). Интродуцтион то Цлассицал Мецханицс: Wитх Проблемс анд Солутионс (1ст изд.). Цамбридге, УК: Цамбридге Университy Пресс. ИСБН 978-0-521-87622-3.
- О'Доннелл, Петер Ј. (2015). Ессентиал Дyнамицс анд Релативитy. ЦРЦ Пресс. ИСБН 978-1-466-58839-4.
- Коетсиер, Теун (1994), „§8.3 Кинематицс”, Ур.: Граттан-Гуиннесс, Ивор, Цомпанион Енцyцлопедиа оф тхе Хисторy анд Пхилосопхy оф тхе Матхематицал Сциенцес, 2, Роутледге, стр. 994—1001, ИСБН 0-415-09239-6
- Моон, Францис C. (2007). Тхе Мацхинес оф Леонардо Да Винци анд Франз Реулеауx, Кинематицс оф Мацхинес фром тхе Ренаиссанце то тхе 20тх Центурy. Спрингер. ИСБН 978-1-4020-5598-0.
- Едуард Студy (1913) D.Х. Делпхеницх транслатор, "Фоундатионс анд гоалс оф аналyтицал кинематицс".
- Едмунд Таyлор Wхиттакер (1904). А Треатисе он тхе Аналyтицал Дyнамицс оф Партицлес анд Ригид Бодиес. Цамбридге Университy Пресс. Цхаптер 1. ИСБН 0-521-35883-3.
- Русселл C. Хиббелер (2009). „Кинематицс анд кинетицс оф а партицле”. Енгинееринг Мецханицс: Дyнамицс (12тх изд.). Прентице Халл. стр. 298. ИСБН 978-0-13-607791-6.
- Ахмед А. Схабана (2003). „Референце кинематицс”. Дyнамицс оф Мултибодy Сyстемс (2нд изд.). Цамбридге Университy Пресс. ИСБН 978-0-521-54411-5.
- П. П. Теодоресцу (2007). „Кинематицс”. Мецханицал Сyстемс, Цлассицал Моделс: Партицле Мецханицс. Спрингер. стр. 287. ИСБН 978-1-4020-5441-9.
- А. Биеwенер (2003). Анимал Лоцомотион. Оxфорд Университy Пресс. ИСБН 019850022X.
- Ампèре, Андрé-Марие (1834). Ессаи сур ла Пхилосопхие дес Сциенцес. Цхез Бацхелиер.
- Мерз, Јохн (1903). А Хисторy оф Еуропеан Тхоугхт ин тхе Нинетеентх Центурy. Блацкwоод, Лондон. стр. 5.
- О. Боттема & Б. Ротх (1990). Тхеоретицал Кинематицс. Довер Публицатионс. префаце, п. 5. ИСБН 0-486-66346-9.
Спољашње везе[уреди | уреди извор]
- Пхyсцлипс: Мецханицс wитх аниматионс анд видео цлипс фром тхе Университy оф Неw Соутх Wалес.
- Кинематиц Моделс фор Десигн Дигитал Либрарy (КМОДДЛ), феатуринг мовиес анд пхотос оф хундредс оф wоркинг моделс оф мецханицал сyстемс ат Цорнелл Университy
- е-боок либрарy оф цлассиц теxтс он мецханицал десигн анд енгинееринг.
- Мицро-Инцх Поситионинг wитх Кинематиц Цомпонентс
| Нормативна контрола: Државне |
|---|