
Koračni motor

Koračni motor je vrsta elektromotora bez četkica koji pretvara digitalne pulseve struje u fiksne inkremente ugaonog pomjeranja nazvane koraci.
Ova vrsta motora obezbjeđuje precizno pozicioniranje tereta, a kontrola motora se vrši direktno računarom, mikrokontrolerom, ili programibilnim logičkim kontrolerom. Zbog svoje konstrukcije bez četkica, koračni motori su pouzdani, izdržljivi, i ne zahtijevaju nikakvo održavanje.
Rad[uredi | uredi izvor]

Osnovni rad je objašnjen na sljedeći način: Polovi rotora su privučeni k polu statora (faza 1) kroz čiju zavojnicu prolazi struja. Jednom tamo, struja protiče kroz zavojnicu pola statora (faza 4), i pol rotora je privučen tu. Zatim se aktivira faza 3, pa faza 2. Ciklus se dalje ponavlja od faze jedan, a ugao koraka je 15°.
Treba primijetiti da je ugao između polova statora 45° a između polova rotora 60°. Ovo je potrebno da se obezbijedi zazor od 15° između polova rotora i statora za idući korak. Inače, rotor se ne bi pokretao pri idućem pulsu struje.
Na idućim slikama prikazan je rad složenijeg koračnog motora sa 100 koraka po rotaciji, ili 3.6° po koraku.
-
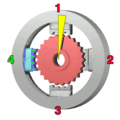
 Rad koračnog motora, korak 1. Elektromagnet 1 je uključen. Kada se polovi rotora poređaju sa polovima statora (1), dolazi do zazora između polova rotora i plova statora (2).
Rad koračnog motora, korak 1. Elektromagnet 1 je uključen. Kada se polovi rotora poređaju sa polovima statora (1), dolazi do zazora između polova rotora i plova statora (2). -
 Rad koračnog motora, korak 2. Elektromagnet 2 je uključen. Zbog zazora (polovi rotora-polovi statora (2)), rotor se dalje okreće dok polovi nisu poređani. Sad se međutim stvara zazor polova na poziciji 3.
Rad koračnog motora, korak 2. Elektromagnet 2 je uključen. Zbog zazora (polovi rotora-polovi statora (2)), rotor se dalje okreće dok polovi nisu poređani. Sad se međutim stvara zazor polova na poziciji 3. -
 Rad koračnog motora, korak 3. Dalje se nastavlja, po principu iz koraka 1 i 2.
Rad koračnog motora, korak 3. Dalje se nastavlja, po principu iz koraka 1 i 2. -
 Rad koračnog motora, korak 4.
Rad koračnog motora, korak 4.




Upotreba[uredi | uredi izvor]
Koračni motori se koriste u primjenama gdje je precizno pozicioniranje od značaja. To su precizne mašine, roboti, medicinska i naučna oprema, štampači i crtači (ploteri), i stariji modeli računarskih diskova.
Konstrukcija[uredi | uredi izvor]
Koračni motori imaju stator sa namotajima i neuzbuđeni rotor. Stator ima paran broj jednako razmaknutih polova (zubaca, zuba), svaki sa zavojnicom. Nasuprotni parovi statorskih zavojnica su spojeni u seriju, dakle kad je jedan u stanju sjevernog pola, drugi je u stanju južnog pola. Stator može da ima 2,3 ili 4 nezavisna kruga, ili faze, povezana sa sjever-jug parovima polova. Rotor ima spoljašnje zupce, jednako udaljene po periferiji, sa malim zračnim rasporom između statorskih i rotorskih zubaca.
Broj zubaca rotora, statora, i broj faza na statoru određuju veličinu koraka. Ovo se zove ugao koraka ili koračni ugao, i za jednostavne motore se da izračunati sa:
Ugao koraka (koračni ugao) = 360° / (broj zuba rotora • broj faza statora)
Za primjer, koračni motor sa 16 zubaca rotora i 4 faze statora ima ugao koraka od 5.6°.
Podjela[uredi | uredi izvor]
Mogu se podijeliti na dvo-, tro- i četvorofazne, zavisno od broja faza. Druga podjela je na motore sa promjenjivom reluktansom, permanentnim magnetom, ili hibrid, zavisno od tipa rotora. Još jedna podjela je na unipolarne i bipolarne koračne motore.
Koračni motori sa promjenjivom reluktansom imaju rotor sačinjen od mekog željeza. Kada struja poteče kroz fazu statora, stvara se magnetski tok (fluks) koji uzrokuje pomjeranje zubaca rotora (i samog rotora) tako da se poređaju ispod polova statora. Kad je struja pomjerena u iduću fazu, rotor se okreće dalje dok zupci nisu ponovno ispod polova statora. Ciklus se dalje ponavlja. Ovi motori se koriste za veće uglove koraka, 15, 30 i 45° tipično.
Koračni motori sa permanentnim magnetom imaju jedan ili više pari polova stalnog magneta u rotoru. Koriste snažne magnete sa dodatkom rijetkih zemalja.
Hibrid motori imaju rotor promjenjive reluktanse sa permanentnim magnetom, obično u rotoru. Pridjev hibrid se odnosi na korištenje 2 izvora magnetskog polja - zavojnice statora i permanentni magnet. Koriste se za male uglove koraka, obično 1.8 i 2.5°. Tipični hibridni motor ima 8 polova, svaki sa 5 zuba i jednostavnom zavojnicom. Rotor ima dva lica polova, svako sa 50 zubaca. Lica polova su razdvojena sa stalnim magnetom, pa jedno lice ima sjeverni pol, a drugo južni. Zavojnice statora su povezane u 2 faze, A i B. Motor se vrti udesno ako su faze aktivirane po redoslijedu: +A, -B, -A, +B, +A, ...
Puni korak, polukorak i mikrokorak[uredi | uredi izvor]
Puni korak je normalni ugao koraka motora, i ovo je njegov normalan način rada.
Polukorak je metoda ostvarenja ugaonog pomaka manjeg od punog koraka. Ostvaruje se tako da su DVIJE zavojnice motora aktivne u isto vrijeme, čime se pol rotora drži u poziciji između polova statora.
Mikrokorak je sličan polukoraku, ali je sad i vrijednost struje u zavojnici podesiva, pa pol rotora može zauzimati veliki broj diskretnih pozicija između polova statora.
Napajanje strujom[uredi | uredi izvor]

Rotor motora se pomiče u inkrementima (koracima), pa zavojnice treba da se uključuju jedna za drugom pod kontrolom mikroprocesora ili mikrokontrolera. One uključuju ili isključuju tranzistore putem baza. Tranzistori zatim propuštaju pulseve jače struje kroz zavojnice. Diode sprečavaju prenapone koji bi mogli da unište tranzistore prilikom prekopčavanja.
Primjer spoja za kontrolu unipolarnog koračnog motora je prikazan na slici.
Spoljašnje veze[uredi | uredi izvor]
- Uvod u koračne motore Arhivirano na sajtu Wayback Machine (7. februar 2009)
- Animacija koračnog motora
- Osnove rada koračnih motora
Literatura[uredi | uredi izvor]
- Bateson, Robert N. to Control System Technology (1999). Introduction (6th izd.). Prentice Hall. str. 386-391. ISBN 978-0-13-895483-3.
| Normativna kontrola: Državne |
|---|