
Beogradska škola robotike
Beogradska škola robotike odnosi se na grupu istraživača u oblasti robotike iz različitih institucija okupljenih u Beogradu. Njihovim radom Beograd je prepoznat kao kolevka moderne humanoidne robotike. Laboratorija za robotiku Instituta Mihajlo Pupin osnovana je 1967. godine. U Laboratoriji je radilo preko 30 istraživača koji su bili mahom mašinski i elektro inženjeri, kao i diplomirani matematičari sa Prirodnomatematičkog fakulteta. Radu laboratorije najviše je doprineo profesor Miomir Vukobratović.
Laboratorija za robotiku[uredi | uredi izvor]
Osnivanje[uredi | uredi izvor]
Laboratorija za robotiku Instituta Mihajlo Pupin osnovana je 1967. godine u Beogradu. Prvobitno je osnovana kao Odeljenje za biokibernetiku u okviru Laboratorije za automatiku. U okviru ove laboratorije profesor Vukobratović je zajedno sa dr Juričićem nastavio proučavanje dinamike i kinematike velikih mehaničkih sistema uglavnom antropomorfnog tipa. Značajne rezultate u oblasti aktivnih mehanizama namenjenih kretanju tj. mehanizama sa pogonskim zglobovima donosi njihov zajednički teorijski rad. Rad pod nazivom Doprinos sintezi bipedalne lokomocije Vukobratović je prvi put predstavio u Moskvi 1968. godine u okviru IFAC 12 simpozijuma na temu Tehnički i biološki problemi kontrole, Jerevan. Rad je štampan naredne godine u zborniku (engl. Transactions on Biomedical Engineering). Ovo je ujedno bio i prvi štampani naučni rad u svetu u okviru oblasti modelovanja lokomocione dinamike. Pola veka kasnije ovaj pionirski rad postao je najproduktivniji i najatraktivniji predmet istraživanja u oblasti humanoidne robotike. Njihov rad je najavio formiranje i izdvajanje Robotike kao posebne naučne discipline i profesije.[1]

Pre nego što je Laboratorija osnovana, proučavanje dvonožnog hoda je izbegavano zbog problema, uključujući problem balansa, odnosno stabilnosti bipedalnog hoda. Sa druge strane, u Laboratoriji se intenzivno radilo na matamatičkom modelovanju antropomorfnih aktivnih mehanizama, proučavanju stabilnosti i sintezi bipedalnog kretanja. Vukobratović je prvi u svetu uspešno objasnio i predstavio veštinu ljudskog dvonožnog kretanja na osnovu Njutnove mehanike i dinamike. Predstavio je jednostavan model dvonožnog kretanja sa sedam stepeni slobode i pet zglobova. Vukobratović je koncept u svojim radovima u periodu između 1970. i 1972. godine nazvao Teorija tačke nula momenta (engl. ZMP, Zero-Moment Point Theory) kojom je rešen problem načina na koji bipedalni roboti mogu da hodaju i održavaju ravnotežu.[1]
Teorijski poduhvati istraživača Laboratorije i Beogradske škole robotike dali su rezultate i primenu u rehabilitacionoj robotici. U Laboratoriji su započeti pionirski radovi na razvoju stvaranju preteča ortoza poput prve protetičke šake, aktivnih egzoskeleta, industrijskog robota, potkolene proteze, itd. Godine 1968. započet je rad na konstruisanju jednostavnih egzoskeleta.

Koliki je bio značaj teorijskog, ali i praktičnog rada svedoči i podatak da je profesor Vukobratović od 1970. godine pozvan više od 145 puta od strane važnih edukativnih instituta i istraživača iz Kine, Rusije, SAD, Italije, Nemačke, Engleske, Poljske, sa ciljem da održi predavanja i prikaže aktuelne rezultate Laboratorije, kao i rad Beogradske škole robotike.[1]
Značajni rezultati ostvareni su zahvaljujući saradnji sa naučnicima iz Amerike. Zajedno su radili na projektu pod nazivom Teorijska studija bipedalnog pokreta kod životinja i mašina, u periodu od 1971. do 1976. godine. Među naučnicima bio je i Robert Makgi sa Državnog univerziteta u Ohaju, SAD. Rad je 1976. godine pozitivno ocenjen od strane predstavnika Nacionalne naučne fondacije. Tom prilikom su istakli da je profesor Vukobratović istaknuti ekspert na ovom polju i da je rad privukao pažnju japanskim naučnicima.[1]
Smanjenim intenzitetom nastavljen je rad u oblasti rehabilitacione robotike u periodu od 1978. do 1982. godine. Godine 1978. nastalo je aktivno odelo, polumeki ortozni uređaj za distrofičare. Projekat aktivnog odela napravljen je uz finansijsku pomoć američke organizacije SRS (Servis za socijalnu rehabilitaciju) i NSF (Nacionalna naučna fondacija) kao deo saradnje Amerike i Jugoslavije. Godine 1982. nastao je novi model aktivnog ortoičkog uređaja za niže ekstremitete distrofičara, prvi na svetu kao i prva u svetu egzoskeletna elektronska ruka za distrofičare. Oba patenta je kupio Teksaški centar za rehabilitaciju u Hjustonu. Pomoću patenata omogućena je aktivna rehabilitacija pomoću robota egzoskeleta.[1]
Industrijska robotika[uredi | uredi izvor]

Istraživački rad se od 1975. godine širi u drugim pravcima. Laboratorija postaje mesto praktičnog i teorijskog rada na polju manipulacije u domenu industrijske robotike. Teorijski doprinos je publikovan u najprestižnijim časopisima i publikacijama kako u Americi, tako i u publikacijama Sovjetske (Ruske) akademije nauka. Razvoj prvog u svetu industrijskog robota antropomorfne forme započeo je 1976. godine. Prvi robot koji je primenjen u domaćoj industriji, fabrici Teleoptik, na poslovima montaže termostata za automobile, nastao je 1978. godine (UMS 1) i bio je pokretan pomoću elektromehaničkog motora. Narednih godina je razvijeno nekoliko uspešnih prototipova industrijskih robota sa softverom poputː UMS2-1980, UMS3-1981 itd. Prototipovi industrijskih robota napravljeni su u saradnji sa vodećim jugoslovenskim preduzećima.[2]
Aktivnost tima Laboratorije na čelu sa profesorom Vukobratovićem beležila je dostignuća i uspehe u različitim segmentima od dinamičkog upravljanja lokomotornim robotima, automatskog dobijanja dinamičkog modela za prostorne aktivne mehanizme, uvođenja upravljanja negativnom povratnom spregom u robotiku, do uvođenja praktičnih testova stabilnosti u upravljanju za robotske mehanizme, novog pristupa modeliranju itd. Tokom osamdesetih godina intenzivno je rađeno na različitim zadacima poput dinamičkog i kinematičkog modelovanja robotskih sistema pomoću računara, adaptivnog upravljanja robotima, višestruke procesorske obrade modela robota itd. Važni rezultati postignuti su i tokom rada na mikroprocesorskim sistemima. Posebno se ističe multiprocesorski univerzalni robotski kontroler visokih performansi baziran na Intel 8086 procesoru. Razvijen je i testiran 1988. godine, a jedan primerak je isporučen i Robotskom centru u Moskvi.[2]
Edukativna robotika[uredi | uredi izvor]
Osamdesetih godina 20. veka nastala je serija edukativnih robota sa ciljem da se ova relativno nova grana nauke promoviše među studentima. Razvijeni su prototipovi edukativnih robota poput modela Robed 01, Robed 02 i Robed 03 koji su imali napredni edukativni softver i RC kontrolere. Roboti su korišćeni na Univerzitetima širom Jugoslavije, ali i van nje, kao sredstvo za modernu edukaciju u robotici i industriji. Naučni i istraživački doprinosi bili su podržani finansijski od strane Ministarstva za nauku i tehnologiju Republike Srbije, Centra za socijalnu rehabilitaciju SAD, UNIDO-a, EUREKA programa itd.[3]
Period od 1992. do 2001. godine[uredi | uredi izvor]
Tokom devedesetih godina Ujedinjene nacije su uvele ekonomske sankcije prema SR Jugoslaviji što je jako pogodilo i rad u Laboratoriji. Finansije su oslabile, a takođe su istaknuti naučnici i saradnici otišli u inostranstvo što je dodatno doprinelo otežanom radu. Laboratorija je tada transformisana u IMP Centar za robotiku u okviru Instituta Mihajlo Pupin.[3]
Novi milenijum[uredi | uredi izvor]

Početkom 21. veka objavljeni su značajni rezultati iz oblasti fazi (engl. Fuzzy) logike, neuronskih mreža, modelovanja i kontrole robotskih sistema i bipedalnog kretanja. Razvijeno je i nekoliko softverskih paketa poput CAD, CADMAN, MANSIM, SIM, AER, FTS itd. Pomenuti softverski paketi našli su primenu u robotskim odeljenjima i drugim istraživačkim institucijama u Španiji, Rusiji, Nemačkoj, Kanadi, Kini, SAD itd. Centar za robotiku se intenzivno bavio matematičkim modelovanjem kinematičkih i dinamičkih robotskih mehanizama, dizajniranjem mehaničkih robotskih struktura, formiranjem koncepta varijabilne geometrije. Danas je u ponudi prozvodnja u oblasti informaciono-komunikacionih tehnologija, izrada robotskih sistema na osnovu znanja iz oblasti mašinstva, robotike i elektronike, automatskog upravljanja računarske tehnike, razvoja i upotrebe robotskih sistema tokom noćnog i dnevnog nadzora, uzimanja uzoraka sa terena, spasilačkih zadataka, za potrebe filmske i scenske industrije, razvoj uređaja i pomagala u kliničkoj praksi itd.[3]
Profesor Vukobratović je rukovodio Laboratorijom sve do 2008. godine. Nasledio ga je dr Aleksandar Rodić koji je i danas njen rukovodilac.[3]
Galerija[uredi | uredi izvor]
-
 Industrijski robot UMS iz 1978. godine, danas se nalazi u Muzeju nauke i tehnike Beograd
Industrijski robot UMS iz 1978. godine, danas se nalazi u Muzeju nauke i tehnike Beograd -
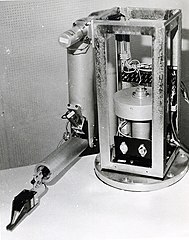
 Ortotička ruka, 1982. godina
Ortotička ruka, 1982. godina -
 Promona 2, industrijski prototip aktivne potkolene proteze, 1990. godina
Promona 2, industrijski prototip aktivne potkolene proteze, 1990. godina -
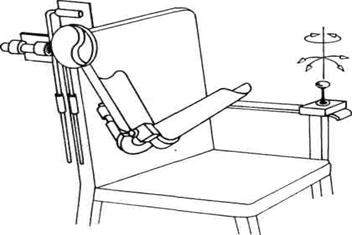 Šema ortotičke ruke
Šema ortotičke ruke




Vidi još[uredi | uredi izvor]
Reference[uredi | uredi izvor]
- ^ a b v g d Stanić 2017, str. 6-16
- ^ a b Stanić 2017, str. 16-18
- ^ a b v g Stanić 2017, str. 19-25
Literatura[uredi | uredi izvor]
- Stanić Ivan (2017), Rođenje humanoidne robotike- katalog izložbe. BeogradːMuzej nauke i tehnike Beograd
Spoljašnje veze[uredi | uredi izvor]
- Računarski fakultet: Istorijski razvoj robotike Arhivirano na sajtu Wayback Machine (22. februar 2019)
- Muzej nauke i tehnike Beograd Arhivirano na sajtu Wayback Machine (4. februar 2019)
- Institut Mihajlo Pupin