| '''Целокупан систем''' || <center>[[Датотека:MSL-complete.jpg|300п]]</center> || Током фазе крстарења целокупан систем тежи 3.400 -{kg}-<ref name="urlSpacecraft summary">{{cite web |url=http://marsprogram.jpl.nasa.gov/msl/mission/spacecraft/ |title=Spacecraft summary |author= |authorlink= |coauthors= |date= |format= |work= |publisher= |pages= |language= |archiveurl= |archivedate= |quote= |accessdate=2. 3. 2012.}}</ref> и конструисан је тако да може да издржи сва напрезања од лансирања до доласка на површину Марса.
| '''Целокупан систем''' || <center>[[Датотека:MSL-complete.jpg|300п]]</center> || Током фазе крстарења целокупан систем тежи 3.400 -{kg}-<ref name="urlSpacecraft summary">{{cite web |url=http://marsprogram.jpl.nasa.gov/msl/mission/spacecraft/ |title=Spacecraft summary |author= |authorlink= |coauthors= |date= |format= |work= |publisher= |pages= |language= |archiveurl= |archivedate= |quote= |accessdate=2. 3. 2012.}}</ref> и конструисан је тако да може да издржи сва напрезања од лансирања до доласка на површину Марса.
|}
|}
=== Фазе слетања ===
Спустити објекат велике масе на површину Марса је велики изазов. Атмосфера је довољно густа да спречи успоравање и слетање на површину помоћу ракетних мотора (попут система коришћених код слетања на [[Месец]]), али је такође довољно ретка да спречи слетање само уз употребу [[падобран]]а.<ref name="urlThe Mars Landing Approach: Getting Large Payloads to the Surface of the Red Planet">{{cite web |url=http://www.universetoday.com/7024/the-mars-landing-approach-getting-large-payloads-to-the-surface-of-the-red-planet/ |title=The Mars Landing Approach: Getting Large Payloads to the Surface of the Red Planet |author= |authorlink= |coauthors= |date= |format= |work= |publisher= |pages= |language= |archiveurl= |archivedate= |quote= |accessdate=2. 3. 2012.}}</ref> Мада су неке претходне мисије користиле ваздушне јастуке за ублажавање слетања, ''Радозналост'' је превелика да би овај систем могао да се употреби.
# '''Навођени улазак:'''
# '''Спуштање падобраном:'''
# '''Спуштање ракетним моторима:'''
# '''Небески кран:'''
== Види још ==
== Види још ==
Верзија на датум 2. март 2012. у 20:00
Један корисник управо ради на овом чланку. Молимо остале кориснике да му допусте да заврши са радом. Ако имате коментаре и питања у вези са чланком, користите страницу за разговор.
Хвала на стрпљењу. Када радови буду завршени, овај шаблон ће бити уклоњен.
Напомене
Шаблон је застарео уколико је прошло дуже од 72 сата од последње измене на чланку. Последњу измену на овој страници начинио је корисник Михаило Јовановић (разговор·доприноси), на датум 2. март 2012. у 20:00.
Није препоручљиво да један корисник овим шаблоном обележи више одједног чланка.
Молимо вас да између уређивачких сеанси уклоните овај шаблон са чланка, како бисте омогућили и другим корисницима да неометано уређују и исправљају чланак.
Шаблон не ограничава друге уреднике да уређују означену страницу али необавезујућа препорука јесте да се чланак значајније не уређује док уредник који ради на чланку не уклони исти.
Марсова научна лабораторија или МНЛ (енгл.Mars Science Laboratory) је мисија Националне аеронаутичке и свемирске администрације са циљем да спусти и оперише лендером званим Радозналост (енгл.Curiosity) на површини Марса.[1] Тренутно на међупланетарној путањи ка Марсу, сонда је лансирана 26. новембра 2011. у 15:02:00.211 УТЦ и требала би да слети на површину планете у Гејл кратер 6. августа 2012. Уколико сонда стигне до Марса, покушаће да слети са много већом прецизношћу од досадашњих сонди а онда ће истражити погодност Марса за живот. Примаран циљ мисије је да покуша да открије да ли је тренутно или у прошлости Марс био погодан за развој живота, мада неће трагати за неким одређеним облицима живота. Уместо тога, ровер ће хемијски анализирати узорке на различите начине, између осталог скупљати узорке тла, бушити стене и користити ласер и пратеће сензоре.[2]
Ровер Радозналост је скоро пет пута већи од ровера Спирит и Опортјунити и на себи носи инструменте чија је маса десет пута већа од масе инструмената на претходним роверима. Ровер је лансиран ракетом Атлас V-541 и након свог пута до планете и слетања на површину би требао да врши научна истраживања током 687 земаљских дана (1 година на Марсу), и пређе 5-20 km.[3]
Марсова научна лабораторија је део програма истраживања Марса агенције НАСА, који представља дугорочни план истраживања црвене планете роботским мисијама. Управљање овим програмом је поверено лабораторији за млазну пропулзију. Укупни трошкови мисије су око 2,5 милијарди долара.[4]
Циљеви и задаци
Мисија МНЛ има четири научна циља:
Утврдити да ли је Марс икада могао да подржи живот
Марс експлорејшн ровер (лево), Соџурнер (средина) у поређењу са Марсовом научном лабораторијом (десно).
Димензије: Ровер Радозналост је дуг 3 метра и тежи 900 килограма, укључујући 80 kg научних инструмената.[6] Приближан је димензијама Мини Купер аутомобила, и много је већи од претходних ровера Спирит и Опортјунити који су дуги 1,5 m, теже 174 kg и носе 6,8 kg научних инструмената.
Брзина: Када се спусти на површину, ровер ће моћи да пређе преко препрека висине 75 cm. Максимална брзина кретања је процењена на 90 m на сат користећи аутоматску навигацију, међутим, просечна брзина кретања ће вероватно бити око 30 m на сат, у зависности од снаге напајања, конфигурације терена, тракције и видљивости. Од МНЛ се очекује да пређе најмање 19 km током своје двогодишње мисије.[7]
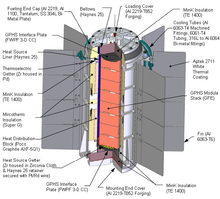
Извор напајања:Радозналост се напаја радиоизотопним термоелектричним генератором, као и Викинг 1 и Викинг 2 лендери 1976. године.[8][9] Системи радиоизотопног напајања су генератори који производе електричну енергију из природног распада плутонијума-238 који је нефисиони изотоп плутонијума. Дијаграм ММРТГ-а.Топлота која се ослобађа природним распадом овог изотопа се претвара у електричну енергију чиме се обезбеђује константно напајање током свих годишњих доба као и током дана и током ноћи. Вишак топлоте се може одвести цевима за загревање система чиме се ослобађа електрична енергија за операцију ровера и инструмената. РТГ-ови овог ровера су напуњени са 4,8 kg плутонијум-238 диоксида који је обезбедио Одсек за енергију САД, спакован у 32 палете величине маршмелоа. Генератори уграђени на Радозналост су најновија генерација РТГ генератора које је конструисао Боинг названих ”Мултимисиони радиоизотопни термоелектрични генератори“ или ММРТГ.[10] Базирани на класичној РТГ технологији, представљају флексибилнију и компактнију опцију, дизајнирану да обезбеди 125 вати електричне енергије и 2000 вати топлотне енергије на почетку мисије. ММРТГ производе све мање енергије јер се троши плутонијумски извор; након 14 година (што представља минимално трајање плутонијумског горива) електрична енергија опада на 100 вати.[10] Марсова научна лабораторија ће производити 2.5 киловат часова на дан, много више од претходних ровера са соларним напајањем, који производе 0.6 киловат часова.
Систем одвођења топлоте: Температуре у подручју где ће ровер слетети варирају од +30 до -127°С. Стога систем за одвођење топлоте користи течност која се пумпа кроз 60 m цеви које се протежу кроз цео ровер да би се осетљиве компоненте држале на оптималној температури.[11] Друге методе загревања унутрашњих компоненти укључују коришћење топлоте коју производе унутрашње компоненте ровера и вишак топлоте од стране ММРТГ-а. Систем такође поседује могућност да хлади компоненте у случају да је то потребно.
Компјутери: Два идентична компјутера унутар ровера, названих “Компјутерски елементи ровера” (РЦЕ), садрже радијационо ојачану меморију да би могли да издрже висок ниво радијације из свемира. Сваки меморијски модул има 256 KBEEPROM, 256 MBDRAM и 2 GBфлеш меморије.[12] У поређењу, Марс експлорејшн ровери имају 3 MBEEPROM, 128 MBDRAM и 256 MBфлеш меморије. РЦЕ компјутери користе RAD750процесор, који је наследник RAD6000 процесора коришћеног код МЕР.[13] RAD750 је способан за 400 милиона операција у секунди док је RAD6000 способан за 35 МИПС.[14][15] Од два компјутера у роверу, један је конфигурисан као резервни, у сличају да закаже примарна јединица. Ровер поседује унутрашњу јединицу за мерење (ИМУ)која обезбеђује податке о положају ровера у 3 осе, а ти подаци се користе при вожњи и навигацији ровера. Компјутери су у константном режиму надгледања да би одржали ровер у оперативном стању. Активности попут узимања фотографија, вожње и операције инструментима се извршавају низом команди које се шаљу роверу са Земље.
Комуникација:Радозналост има два начина комуникације - X таласни транспондер који има могућност да директно комуницира са Земљом, и UHF Електра радио за комуникацију са орбитерима у орбити око Марса. Комуникација са орбитерима ће бити главно средство слања података, пошто орбитери имају јаче напајање и веће антене.[16] У тренутку слетања, сигналу ће бити потребно 13 минута и 46 секунди да стигне до Земље.[17]
Систем кретања: Као и претходни Марс експлорејшн ровери и Марс патфајндер, Радозналост је опремљена са 6 точкова и посебним вешањем. Систем вешања ће такође бити употребљен као стајни трап при слетању. Точкови ће бити значајно већи него ког претходних ровера. На сваком точку је остављен посебан шаблон који побољшава пријањање али такође оставља отиске на песковитој површини Марса. Ове отиске користе као референца камерама за прорачун пређене удаљености. Сам шаблон је написан Морзеовом азбуком и представља слова ЈПЛ (·--- ·--· ·-··).[18]
Стубна камера (енгл.MastCam): овај инструмент омогућава снимање фотографија у видљивом и другим спектрима помоћу две камере.[20] Ове камере снимају фотографије у боји резолуције 1.600 x 1.200 пиксела, и компресован видео високе дефиниције (10 фрејмова у секунди) резолуције 720p (1.280 x 720). Једна камера ће бити камера средњег угла (Medium Angle Camera - MAC) жижне даљине 34 mm, видног поља 15° и производи размеру од 22 cm по пикселу са удаљености од 1 km. Друга камера ће бити камера уског угла (Narrow Angle Camera - NAC) жижне даљине 100 mm, видног поља 15° и производи размеру од 7,4 cm по пикселу са удаљености од 1 km.[20] Малин корпорација је такође развила пар ових камера са посебним објективом који поседује могућност зумирања,[25] али оне нису укључене у коначан дизајн јер њихово тестирање није могло да се заврши у року за лансирање ка Марсу 2011. године.[26] Свака камера ће имати 8 GB флеш меморије што омогућава складиштење преко 5.500 слика.[20] Камере такође поседују аутофокус што им омогућава да фокусирају објекте удаљене од 2,1 m до бесконачности.[22]Камера роботске руке - MAHLI. У поређењу са камерама Марс експлорејшн ровера (црно-беле панорамске камере резолуције 1.200 x 1.200 пиксела) MAC MastCam камера има 1,25x већу просторну резолуцију, а NAC MastCam 3,67x већу просторну резолуцију.[22]
Камера роботске руке (енгл.Mars Hand Lens Imager) - MAHLI: овај инструмент се састоји од камере монтиране на роботској руци ровера која се користи за микроскопско фотографисање камења и земљишта. Камера снима фотографије у боји резолуције 1.600 x 1.200 пиксела, при чему резолуција по пискелу достиже 14,5 микрометара. MAHLI има жижну даљину од 18,3 mm до 21,3 mm и видно поље од 33,8 до 38,5°.[20] Камера поседује бело и ултраљубичасто LED осветљење за сликање у мраку или за сликање флуоресценције.Ту је и могућност механичког фокусирања од бесконачности па све до удаљености од свега неколико милиметара.[20]
Камера за сликање при слетању (енгл.MSL Mars Descent Imager) - MARDI:Камера за сликање при слетању - MARDI. Током слетања на површину Марса MARDI ће константно фотографисати окружење, при чему ће слике бити 1.600 x 1.200 пиксела и експозицијом од 1,3 милисекунди. Прикупљање фотографија стартује са висине од 3,7 km па све до 5 m изнад површине, сваке секунде се прикупи 5 слика а целокупан процес ће трајати око 2 минута.[21][27] Величина пиксела ће бити 1,5 m са висине од 2 km па све до 1,5 mm са висине 2 m, док је видно поље 90°. MARDI има унутрашњу меморију величине 8 GB што омогућава складиштење 4.000 фотографија. Ове фотогафије ће помоћи тиму ровера да се упозна са окружењем и конфигурацијом терена места слетања што ће помоћи при операцијама и научним истраживањима.[21]
Хемијска камера (енгл.ChemCam): је апарат који се састоји од два инструмента за даљинско истраживање (без физичког контакта). Први је ласерски индукована спектроскопија (Laser-induced breakdown spectroscopy - LIBS) која је по први пут употребљена на некој свемирској мисији, а други је даљинска микро-камера (Remote micro-imager RMI).[28][29] LIBS инструмент може ласерским снопом да нациља стену или неки део терена са удаљености од 7 m при чему део тог материјала испарава и затим се Уметниково виђење - ровер користи ChemCam инструмент. спектралном анализом тих испарења утврђују његова својства. Таласна дужина ласерског снопа је 1067 nm са пулсом од 5 наносекунди. Детекција лопте светлеће плазме ће бити вршена у видљивом као и у ултраљубичастом и инфрацрвеном спектру, таласне дужине 240 nm и 800 nm.[28] Користећи исту оптику RMI обезбеђује контекстне слике места која анализира LIBS. RMI може да разазна објекте величине 1 mm са удаљености од 10 m и са те удаљености има видно поље 20 cm.[28] ChemCam инструмент је развила Национална лабораторија у Лос Аламосу у сарадњи са француском CESR лабораторијом.[28][30][31] НАСА је утрошила 10 милиона долара на развој ChemCam инструмента, укључујући и око 1,5 милиона долара прекорачења дефинисаног буџета, што је око 0,05% укупног буџета целе мисије. Француска свемирска агенција доставила је прототип стуба са инструментом лабораторији у Лос Аламосу, а затим и коначан модел лабораторији за млазну пропулзију у фебруару2008.[32]
Спектрометар алфа-честица X-зрака (енгл.Alpha-particle X-ray spectrometer) - APXS: овај спектрометар ће озрачити инструменте алфа-честицама и мапирати спектар Х-зрака који се притом одбију назад да би се утврдио елементарни састав узорка. Спектрометар алфа-честица X-зрака - APXS. APXS је варијанта рендген емисије индуковане честицама (Particle-induced X-ray emission - PIXE) која је претходно коришћена код Марс патфајндер и Марс експлорејшн ровер мисија. Инструмент је дизајнирала и направила Канадска свемирска агенција.[33]
Хемија и минералогија (енгл.Chemistry and Mineralogy) - ChemMin: је инструмент рендгенске структурне анализе и рендгенске флуоресценције[34] и један је од четири спектрометра која поседује ровер. Он ће идентификовати и одредити колика је распрострањеност минерала на Марсу. Дизајнирали су га ејмс истраживачки центар и лабораторија за млазну пропулзију. Ровер ће бушењем ситнити стене и резултујући уситњени материјал испитати уз помоћ овог инструмента. Сноп рендгенских зрака се усмерава кроз овај прах тако да унутрашња кристална структура минерала скреће сноп и ствара образац рендгенских зрака. Сви минерали скрећу рендгенске зраке на специфичан начин и стварају уникатне обрасце (попут отиска прста код човека) тако да научници могу да одреде структуру минерала са којима ће се ровер сусретати.[34]
Анализа узорака на Марсу (енгл.Sample analysis at Mars) - SAM: овај скуп инструмената анализира органска једињења и гасове како из саме атмосфере тако и из чврстих узорака.[35][36] Развијен је у партнерству Годард спејс флајт центра, француске атмосферске лабораторије и многих других партнера.[35][37] SAM се састоји од три посебна инструмента: SAM пакет инструмената.
Квадруполни масени спектрометар (енгл.Quadrupole Mass Spectrometer) - QMS: ће детектовати гасове из атмосфере или оне који се ослобађају из узорака приликом њиховог загревања.[35]
Гасни хроматограф (енгл.Gas Chromatograph) - GC: ће се користити за издвајање специфичних гасова из сложених једињења у молекулске компоненте са опсегом масе 2–235 u.[35]
Детектор и процена радијације (енгл.Radiation assessment detector) - RAD: овај инструмент је први укључен од свих инструмената МНЛ. Током пута ка Марсу и за време истраживања по површини, овај инструмент ће карактерисати широк спектар радијационих окружења кроз која ће ровер проћи. Оваква мерења никада до сада нису обављена из унутрашњости летелице и њихов главни циљ је да утврди ниво заштите који ће бити потребан људским истрживачима. Развијен је у кооперацији југозападног истраживачког института (SwRI) из Сан Антонија и универзитета у Килу у Немачкој.[39]
Динамички албедо неутрона (енгл.Dynamic albedo of neutrons) - DAN: пулсни извор и детектор неутрона за мерење водоника и воде или леда на површини или одмах испод површине Марса. Инструмент је обезбедила федерална космичка агенција Русије.[40]
Станица за праћење роверовог окружења (енгл.Rover environmental monitoring station) - REMS: метеоролошки пакет и сензор ултраљубичастог зрачења који је обезбедило шпанско министарство образовања и науке у сарадњи са финским метеоролошким институтом.[41][42] Биће монтиран на стуб камере и мерити атмосферски притисак, влажност ваздуха, струјање и јачину ветра, температуру тла и ваздуха као и ниво ултраљубичастог зрачења. Сви сензори су груписани око три елемента: две гране прикачене на стуб за даљинско надгледање (Remote Sensing Mast - RSM), склопа ултраљубичастог сензора (Ultraviolet Sensor - UVS) који се налази на горњој страни ровера и јединице за контролу инструмената (Instrument Control Unit - ICU) која се налази унутар ровера. REMS ће пружити нове трагове о свеопштој циркулацији Марса, локализованим временским системима, локалним хидролошким циклусима, шкодности ултраљубичастог зрачења и могућности насељења испод површине на основу интеракције између атмосфере и земљишта.[41]
Инструментација за улазак у атмосферу и слетање (енгл.MSL entry descent and landing instrumentation) - MEDLI: главни задатак MEDLI пројекта је да надгледа аеротермална окружења, потповршинске промене материјала топлотног штита, оријентацију ровера и густину атмосфере током уласка кроз атмосферу све до одвајања топлотног штита и ослобађања ровера.[43][44] MEDLI пакет са инструментима ће бити инсталиран унутар топлотног штита улазног возила. Прикупљени подаци ће олакшати рад будућих мисија тиме што ће обезбедити податке о атмосфери за потврду модела Марсове атмосфере и за одређивање тачних спецификација при дизајнирању мисија. Шематски приказ инструмената ровера. MEDLI се састоји од три главна подсистема: MEDLI интегрисани утикачи сензора (MEDLI Integrated Sensor Plugs - MISP), систем података при уласку у атмосферу Марса (Mars Entry Atmospheric Data System - MEADS) и електроника за подршку система (Sensor Support Electronics - SSE).
Камере за избегавање препрека (енгл.Hazard avoidance cameras) - Hazcams: МНЛ ће користити два пара црно-белих навигационих камера монтираних лево и десно на предњој и на задњој страни ровера.[45][46] Оне се користе за аутоматско избегавање препрека при вожњи ровера и за позиционирање роботске руке при теренским испитивањима. Камере ће сликати у видљивом спектру и тако склапати 3D стереоскопске фотографије. Камере имају видно поље од 120° и могу да мапирају терен 3 метра испред ровера. Ове фотографије служе као сигурносна мера да се ровер не би случајно сударио са неком препреком, и ради у тандему са софтвером који омогућује роверу да сам доноси сигурносне одлуке.[45]
Навигационе камере (енгл.Navigation cameras) - Navcams: МНЛ ће користити пар црно-белих навигационих камера монтираних на стуб за подршку кретању по терену.[45][46] Камере ће сликати у видљивом спектру и тако склапати 3D стереоскопске фотографије. Камере имају видно поље од 45°.[46]
Марсова научна лабораторија полетела је са лансирног комплекса 41 свемирског центра Кенеди 26. новембра 2011. помоћу Атлас V-541 ракете коју је обезбедила компанија United Launch Alliance. Ракета се састојала из две фазе, укључујући заједничко језгро пречника 3,8 m које покреће РД-180 ракетни мотор, четири бустера на чврсто гориво и једну кентаур горњу фазу са омотачем пречника 5,4 m. Ова конфигурација ракете може да лансира терет од 7.982 kg у геостационарну трансфер орбиту. Атлас V ракета је такође коришћена за лансирање орбиталног истраживача Марса и сонде Нови хоризонти.[47]
Место слетања
Критеријуми за избор
Гејл кратер са елипсом која означава место слетања. Стрелице показују две локације које су од великог интереса за научнике (дубоки кањони).[48]
Главно питање при избору оптималног места за слетање је идентификација специфичног геолошког окружења (или скупа окружења) која би могла да подрже микробиолошки живот. Да би се смањио ризик од неуспеха и осигурала највећа шанса за остваривање научних циљева, нагласак се ставља на места која имају велики број научних циљева. Сходно томе, место слетања са морфолошким и минералошким доказима о води у прошлости има предност при избору у односу на места без ових карактеристика. Места чија спектрална анализа указује на хидриране минерале, минерале глине и соли сулфата такође указују на богато налазиште. Хематит, оксиди гвожђа, минерали сулфата и силицијума, силицијум диоксид, а можда и хлоридни минерали спадају у подлоге које су погодне за очување фосила. Сви они су пронађени при ископавањима фосила на Земљи.[49] Тежак терен је најбољи кандидат за налажење доказа о условима за живот, тако да инжењери морају бити сигурни да ровер може да им приступи и креће се по њима.
Због инжењерских ограничења место слетања морало је да буде удаљено највише 45° од Марсовог екватора, и да има висину мању од 1 km у односу на референтну нулту тачку.[50] На првој радионици за избор места слетања одабране су 33 потенцијалне локације.[51] До друге радионице која је одржана крајем 2007. број локација се попео на 50[52], али се до завршетка ове радионице овај број смањио на шест.[53][54][55] У новембру 2008. на трећој радионици лидери пројекта су свели избор на четири потенцијалне локације:[56][57][58]
Четврта радионица одржана је крајем септембра 2010.[63] а пета и последња од 16. до 18. маја 2011. године.[64]Гејл кратер је одабран за место слетања марсове научне лабораторије 22. јула 2011. године.[65][66][48]
Локација и карактеристике
Места која би ровер могао да истражи. Приказана елипса је димензија 20 x 25 km.
На основу рангирања места за слетање које су урадили истражитељи пројекта, администратори агенције НАСА одабрали су Гејл кратер за место слетања ровера.[65][66][48] Унутар Гејл кратера налази се планина састављена од слојевитог материјала која се уздиже 5 km избад пода кратера коју ће Радозналост истражити. Место слетања је раван предео одмах поред планине која се уздиже у средини. Ровер би требао да се приземљи унутар елипсе димензија 20 x 25 km унутар кратера чији је пречник 154 km.
На месту слетања ровера наталожен је материјал који се спрао са зидова кратера који ће научницима пружити шансу да истраже стене које чине темељ (основу) ове области. Елипса такође обухвата веома густ и светло обојен тип стена који до сада није истражен на површини планете. Постоји могућност да су те стене наслаге из прастарих слатководних мочвара и оне ће бити прва мета у потрази ровера за органским молекулима.[67]
Међутим, област од највећег научног интереса за ровер је у подножју планине, одмах изван елипсе слетања, преко поља тамних дина. На овој локацији инструменти на орбитерима су открили присуство минерала глине и соли сулфата.[68] Научници који се баве истраживањем Марса имају неколико хипотеза које објашњавају како ови минерали указују на промене које су се догодиле окружењу, посебно промене количине воде на површини планете.
Ровер ће користити све своје инструменте за утврђивање порекла ових минерала. Ове стене су још једна од примарних мета у потрази за органским једињењима пошто су оваква окружења могла да подрже настанак микроорганизама.
Два кањона су урезана кроз слојеве материјала који садрже минерале глине и соли сулфата наталожене након формирања слојева. Ови кањони излажу слојеве стена који садрже десетине или стотине милиона година климатских промена. Радозналост ће можда моћи да истражи ове слојеве у деловима кањона који су најближи месту слетања и тако приступити подацима о променама окружења на Марсу. Кањони такође садрже седимент који је нанела вода приликом настанка кањона.[69] Ови седименти су били у контакту са водом у време када је ова средина можда била насељена неким облицима живота. Тако да су наслаге у подножју кањона трећа мета у потрези за органским једињењима.
Систем слетања
Компоненте система
Крстарећи модул
Крстарећи модул управља марсовом научном лабораторијом током лета од Земље до Марса. Садржи компоненте за регулацију температуре и комуникацију са контролом мисије. Пре уласка у атмосферу планете овај модул се одбацује.
Капсула
Капсула садржи силазну фазу. Она штити ровер од елемената током крстарења до планете и оптерећења приликом уласка у Марсову атмосферу. На горњем делу су складиштени падобрани који ће успорити спуштање капсуле. Поред њих се такође налазе антене за комуникацију.
Силазна фаза
Након што су испунили свој задатак топлотни штит и капсула се одвајају и ослобађају силазну фазу. Она обезбеђује сигурно и прецизно постављање ровера на површину Марса што се постиже употребом радара и контролом појединих ракетних мотора. У овој фази су такође важне комуникационе компоненте које се користе током фазе крстарења.
Ровер Радозналост
Ровер Радозналост је срж мисије и он садржи све најважније научне инструменте као и делове комуникационог система. Током крстарења стајни трап ровера је у скупљеном положају ради уштеде простора унутар капсуле.
Топлотни штит
Топлотни штит, како му само име сугерише, штити компоненте од веома високих температура приликом уласка у атмосферу Марса.
Целокупан систем
Током фазе крстарења целокупан систем тежи 3.400 kg[70] и конструисан је тако да може да издржи сва напрезања од лансирања до доласка на површину Марса.
Фазе слетања
Спустити објекат велике масе на површину Марса је велики изазов. Атмосфера је довољно густа да спречи успоравање и слетање на површину помоћу ракетних мотора (попут система коришћених код слетања на Месец), али је такође довољно ретка да спречи слетање само уз употребу падобрана.[71] Мада су неке претходне мисије користиле ваздушне јастуке за ублажавање слетања, Радозналост је превелика да би овај систем могао да се употреби.
^ абв„Mars rover aims for deep crater”. Приступљено 28. 2. 2012.Грешка код цитирања: Неисправна ознака <ref>; назив „urlMars rover aims for deep crater” је дефинисано више пута с различитим садржајем




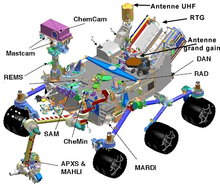
 Шематски приказ главних делова.
Шематски приказ главних делова. Поређење точкова: Соџурнер, Марс експлорејшн ровери, Марсова научна лабораторија.
Поређење точкова: Соџурнер, Марс експлорејшн ровери, Марсова научна лабораторија. Ровер током тестова мобилности. На точковима се може видети шаблон ЈПЛ у Морзеовој азбуци.
Ровер током тестова мобилности. На точковима се може видети шаблон ЈПЛ у Морзеовој азбуци. Соба у којој се склапао ровер.
Соба у којој се склапао ровер. Тестирање преласка преко препрека.
Тестирање преласка преко препрека. Пуњење ММРТГ-а марсове научне лабораторије.
Пуњење ММРТГ-а марсове научне лабораторије.










.jpg)

.jpg)
.jpg)












