
Ровер



Ровер (од енгл. rover — „луталица, номад”), такође зван и планетарни ровер (енгл. planetary rover) или планетоход (рус. планетоход), је возило које се користи за истраживање свемира конструисано за кретање по површини планете или неког другог небеског тела. Неки ровери били су конструисани за превоз људи, док су други били делом или у потпуности аутономни роботи. Ровери се на површину неког небеског тела обично спуштају уз помоћ лендера (летелице која се спушта према површини планете малом брзином – мекано слетање) или неке сличне свемирске летелице.[1]
Поређење са свемирским летелицама другог типа[уреди | уреди извор]

Ровери имају неколико предности у односу на лендере, који су стационарни – могу истражити већу територију и могу се упутити да истраже занимљиве површинске одлике које им се нађу на путу. Уколико им се батерије напајају соларним панелима, могу се позиционирати тако да прикупе што више светлости у време зимских месеци када је Сунце ниско изнад хоризонта. Ровери такође помажу у сазнањима о управљању роботима преко веома великих удаљености. Сваки ровер мора бити макар делом аутономан јер радио-сигнали путују брзином светлости, па им треба времена да стигну од контролора са Земље до ровера.
Предност ровера у односу на орбитере (летелице које истражују неко небеско тело из орбите) је да он може да испита површину небеског тела све до микроскопског нивоа и могу вршити физичке експерименте (инструменти на роверу су у контакту са површином, па је тако могуће детаљније је испитати на разне начине). С друге стране, ровери имају ману у односу на орбитере јер је већа вероватноћа да доживе неуспех, због слетања и других ризика који се јављају, и могу истражити релативно малу површину небеског тела око самог места слетања, док орбитери својим инструментима могу „видети“ целу површину из орбите.
Одлике[уреди | уреди извор]
Ровери до свог одредишта (површине неког небеског тела) стижу свемирском летелицом типа лендера и морају да раде у условима који се значајно разликују од услова који владају на Земљи, што захтева да њихова конструкција буде робусна. На пример, електрични мотори у точковима ровера морају да буду у стању да поднесу снажне трзаје које ровер искуси при слетању, затим морају бити довољно поуздани да раде на температурама далеко испод 0 °C, али и да буду дуготрајни (електромотори за ровере Спирит и Опортјунити су током тестирања на Земљи радили више година без престанка).
Поузданост[уреди | уреди извор]
Цела конструкција ровера мора бити устању да поднесе велике промене убрзања (g-силе), високе и ниске температуре, притисак, прашину, корозију, космичко зрачење, и да поред свега тога системи буду оперативни макар током примарне мисије.

Компактност[уреди | уреди извор]
Ровери се обично пакују на летелицу која ће их доставити на површину планете или неког другог небеског тела. Зато морају бити расклопиви, односно, морају се што компактније спаковати на лендер а затим се по слетању морају сами распаковати (види слику лево – точкови ровера су савијени како би заузимао што мање простора у фази крстарења). Ровери су такође током фазе крстарења од Земље до места истраживања повезани са летелицом која ће их тамо доставити ради напајања, тако да ове везе морају бити прекинуте током или након слетања пре него што ровер крене у истраживање.
Аутономија[уреди | уреди извор]
Даљинска контрола ровера у реалном времену могућа је само у случају да су то лунарни ровери (луноходи), јер је од небеских тела у Сунчевом систему једино Месец довољно близу да команде послате радио везом до њега стигну скоро истог тренутка. Разлог је брзина радио-сигнала, који се крећу брзином светлости. Месец је од Земље у просеку удаљен 384.399 km, док брзина светлости износи 299.792,458 km/s, тако да сигналу са Земље треба само око 1,282 секунде да стигне до ровера. С друге стране, уколико се ровер налази на Марсу (марсоход), брзина сигнала је иста, али је удаљеност далеко већа, па сигналу треба између 3 и 21 минута да са Земље стигне до ровера, и још толико да се врати назад како би контрола мисије добила повратну информацију. Стога, степен аутономије ровера (осим у случају лунохода) мора бити висок. На пример, ровери који слете на Марс су већином аутономни, у својим компјутерима имају команде које им омогућују научна истраживања, кретање и прикупљање узорака, мада је и даље неопходно да им се са Земље пошаљу команде које ће их упутити ка некој „мети“ за анализу.[2] Ови ровери су најчешће опремљени софтвером који анализира прикупљене фотографије и на основу њих може сам да изабере најбољу путању којом ће стићи до дестинације која му је задата, избегавајући успут велико камење или дубок песак, чиме се значајно убрзава његово кретање по површини и омогућава обилазак већег броја локација за мање времена.[2]

Конструкција[уреди | уреди извор]
Извор напајања[уреди | уреди извор]


Свим роверима извор напајања су батерије, које обезбеђују електричну енергију за електромоторе у точковима, за снимање фотографија и за рад научних инструмената и за одржавање виталних компоненти ровера (попут рачунара и неких инструмената) загрејаним, односно на некој температури коју компоненте могу толерисати а да се не покваре. Капацитет батерије варира у зависности од величине ровера и тога колико енергије је потребно за напајање свих система. Први ровери имали су веће батерије јер инструменти нису били енергетски ефикасни (трошили су много енергије), а са развојем енергетске електронике и других технологија батерије су или постајале мање или је већи број инструмената могао да ради са истим капацитетом (на пример, ровер Кјуриосити има укупно 11 инструмената који се напајају са само 125 W, што је мало више од обичне сијалице).
Разлике постоје и код методе којом се батерије пуне. До сада су примењиване три методе. Прва, коришћена код совјетских ровера Луноход 1 и 2 и код кинеског ровера Јуту, подразумева пуњење батерије преко соларних панела током времена које ровер проводи на осунчаној страни Месеца, и тада батерије обезбеђују напајање за све системе. Током лунарне ноћи (која траје 14 дана) батерије ровера са не допуњују, а извор напајања тада је радиоизотопна јединица за грејање (коришћено гориво био је плутонијум-210) која одржава температуру унутар ровера, али не и напајање за остале системе. Када се Сунце поново појави иза хоризонта, батерије почињу да се пуне преко панела и поново преузимају напајање свих система. Друга, коришћена код америчких марсовских ровера Соџурнер, Спирит и Опортјунити, подразумева напајање батерија само путем соларних панела, без радиоактивног извора за грејање система током ноћи. Ово је било могуће јер су дан и ноћ на Марсу приближног трајања као и на Земљи, док је на Месецу ноћ далеко дужа, па батерије не би биле довољне.

Предност оваквог система је што нема употребе радиоактивног материјала, па је припрема ровера мање сложена. Инжењери су мислили да ће соларни панели радити у пуној ефикасности (производити максимум енергије) само током првих неколико седмица мисије, а да ће затим бити прекривени прашином и да ће до краја мисије производити само трећину почетне енергије. Међутим, испоставило се да се на панелима не сакупља тако велика количина прашине. Уз то, повремено се догоди, пуком срећом, да налети ветра одувају прашину са површине панела, тако да они поново производе скоро максималну количину енергије. Ово се догодило више пута са роверима за истраживање Марса, тако да ровер Опортјунити наставља да истражује црвену планету и десет година након завршетка примарне мисије. Овим је показано да се соларни панели могу користити и на осталим мисијама, а не само на орбитерима. Трећа метода за сада је коришћена само једном, на роверу Кјуриосити агенције НАСА. Подразумева напајање ровера искључиво путем радиоактивног извора.[3][4] У ровер је уграђен најмодернији мултимисиони радиоизотопни термоелектрични генератор (ММРТГ), који је развила компанија Боинг.[5] Овакав систем напајања омогућава роверу да оперише и дању и ноћу, без зависности од Сунца. Такође, животни век овог извора је најмање 14 година, када ће његова снага опасти са почетних 125 на 100 W, али ће ровер моћи и даље да користи већину инструмената, или све наизменично, под условом да они до тада не откажу.[6] Овај извор напајања добро се показао, тако да НАСА планира да га употреби и код наредне мисије заказане за 2020. годину.
„Тело“ ровера[уреди | уреди извор]
Такозвано „тело“ ровера је централни део у којем се налазе сви витални системи и понекад научни инструменти. „Тело“ је по правилу квадар, на који су накачени точкови, соларни панели (уколико се ровер њима напаја), инструменти, камере, роботска рука и друго. Овај део ровера има уграђене грејаче који у унутрашњости одржавају температуру јер су неке компоненте осетљиве на ниске температуре (на пример, на Марсу се температура ноћу спусти и испод -100 °C). Најважнија компонента које се налази у телу је рачунарска јединица, која се обично састоји из два рачунара (главног и помоћног, који преузима дужност у случају отказа главног, а истих су карактеристика) и меморијског модула. Зависно од вешања које је уграђено, тело ровера се налази ближе или даље од површине небеског тела по којем се креће. Ово је важно јер се у првом случају мора пазити куда се ровер креће, да се не би догодило да неки камен закачи доњи део „тела“ и оштети га, а може се десити и да се ровер тако заглави, и у том случају мисији би био крај.
Точкови[уреди | уреди извор]
Точкови ровера су различите конструкције и облика, зависно од дестинације на коју се шаље и од карактеристика површине тог небеског тела. Совјетски Луноходи су имали осам точкова, лунарно возило које је коришћено током људских мисија на Месец пројекта Аполо имало је четири, док су сви марсовски ровери и лунарни ровер Јуту имали шест точкова. Конструкција точкова углавном је слична, односно, праве се тако да обезбеде најбоље налегање на површину уз најмању масу. Занимљиво је да су инжењери код ровера Кјуриосити у точкове уградили низ рупица које Морзеовом азбуком у површини Марса исписују ЈПЛ – скраћеница Лабораторије за млазни погон.[7] Ово је веома практично решење за утврђивање дистанце коју је ровер прешао и упоређивања са подацима који се добију од електромотора на точковима, тако да инжењери могу да утврде да ли су и колико точкови проклизавали.
-
 Провера исправности точка ровера Кјуриосити
Провера исправности точка ровера Кјуриосити -
 Поређење величина точкова марсовских ровера
Поређење величина точкова марсовских ровера -
 Точак лунарног возила
Точак лунарног возила -
 Точкови совјетских Лунохода
Точкови совјетских Лунохода
.gif)



Камере[уреди | уреди извор]

Први ровери поседовали су ТВ камере ниске резолуције и у црно-белој техници. Ове камере обично су биле постављене на тело ровера, тако да су се налазиле ниско и нису могле да се ротирају. Луноходи су поседовали три камере. Први марсовски ровер, Соџурнер, такође је поседовао три камере. Две су биле постављене на предњу страну ровера и биле су црно-беле, док је једна била постављена позади и била је у боји. Ровери Спирит и Опортјунити опремљени су са девет камера – четири су биле монтиране на стубу који се уздизао 1,5 метара од површине и служиле су за панорамско разгледање околине. Стуб може да се ротира 360°. Друге четири камере монтиране су на тело ровера, две напред и две позади, и служе за осматрање терена и избегавање препрека. Последња камера налази се на роботској руци ровера, и служи за фотографисање стена из велике близине, како би научници могли што боље да виде њихову структуру. Последњи ровер који је слетео на Марс, Кјуриосити, поседује чак 17 камера: 8 камера за избегавање препрека монтираних по четири на предњу и задњу страну ровера, 4 навигационе камере монтиране на стуб које служе за фотографисање путање којом се ровер креће и одређивање најбезбеднијег пута, две камере високе резолуције које служе за фотографисање удаљених објеката, једна камера налази се на роботској руци и научницима служи као микроскоп, и последња камера је у ствари веома моћан ласер који испаљује пулсеве енергије услед којих стена испарава а затим камера ту пару анализира и тако се утврђује састав стене.[8][9][10][11][12][13][14][15][16][17][18][19][20][21][22][23]
Кинески ровер Јуту поседује сличне камере као ровери Спирит и Опортјунити, али уз то може да врши пренос уживо јер је Месец довољно близу да је ова могућност доступна. Видео силаска ровера са лендера доступан је на сајту Јутјуб и може се видети овде.
„Рука“ ровера[уреди | уреди извор]


Употреба роботске руке на роверима почела је са роверима за истраживање Марса агенције НАСА. Научници су имали идеју да макар један, а ако је могуће и неколико научних инструмената поставе на неку врсту роботске руке којом би ти инструменти могли да буду принесени до саме површине планете како би извршили анализу. Инжењери су ту идеју спровели у дело и конструисали роботску руку која има три зглоба, и на коју су могли да се поставе инструменти. Сами инструменти су наменски конструисани како би били што компактнији и са што мањом масом, јер је роботска рука имала ограничење у маси коју може да пренесе. Исто тако, смањивање габарита инструмената значило је да се на руку може поставити више њих уместо једног. Званичан назив био је уређај за премештање инструмената (енгл. instrument deployment device), али инжењери и сви остали чланови тима најчешће користе термин „роботска рука“ или само „рука“ ровера. На руци ровера за истраживање Марса монтирани су следећи инструменти: Месбауеров спектрометар,[24][25] спектрометар алфа-честица X-зрака[26], магнети за прикупљање честица прашине, микроскопска камера и алат за скидање површинског слоја прашине са стена.

Ровер Кјуриосити је следећи који је био опремљен роботском руком. Овај ровер је већих габарита од претходних ровера, тако да су инжењери на њега могли да уграде већу роботску руку, па самим тим и боље научне инструменте. Рука овог ровера дуга је 2,1 m, а на њеном крају налази се купола спљоштеног облика по чијем обиму су постављени инструменти, и ова купола се може ротирати 350° како би сваки инструмент могао да се постави у оптималну позицију за анализу. Рука има три зглоба како би што боље могла да позиционира инструменте до мета за анализу далеко од ровера. Када научници желе да испитају неки део терена, ровер се зауставља и отвара (испружи) руку; након тога, када се све анализе заврше, рука ровера се склапа у почетни положај и ровер креће ка следећој дестинацији (рука ровера је увек у склопљеном положају када је ровер „у путу“, односно када прелази велику удаљеност од више десетина или стотина метара, али када се заустави да испита неку мету рука се расклапа и тада се ровер може кретати али знатно спорије). Рука заједно са инструментима има масу 30 kg, и максимални пречник куполе са инструментима је 60 cm.
Два од пет инструмената на руци испитивања врше in-situ (веома близу своје мете), и то су спектрометар алфа-честица X-зрака и MAHLI камера. Остала три су везана за прикупљање и припрему узорака – бушилица, абразивна четкица и уређај за прикупљање, мрвљење и достављање узорака у инструменте који се налазе у телу ровера кроз отвор на горњем делу „тела“. Пречник рупе након бушења је 1,6 cm и максимална дубина може бити до 5 cm. Бушилица поседује две резервне главе (бургије).[27][28][29][30][31]
Историја[уреди | уреди извор]

Луноход 1А[уреди | уреди извор]
Совјетски роботизовани ровер требало је да постане први робот на површини Месеца који ће бити даљински контролисан, али се догодила несрећа при лансирању ракете-носача 19. фебруара 1969. године.
Луноход 1[уреди | уреди извор]
Ровер Луноход 1 приземљио се на површину Месеца у новембру 1970. године.[32] Тиме је постао први даљински контролисан робот који је слетео на неко небеско тело. Совјетски Савез лансирао је Луноход 1 заједно са лендером Луна 17 10. новембра 1970. године. Ова летелица је затим ушла у орбиту око Месеца 15. новембра, а затим се спустила на површину 17. новембра на локацију Море кише (лат. Mare Imbrium). Лендер је поседовао две рампе којима је ровер могао да сиђе са лендера на површину, што се и догодило на дан слетања у 06.28 UTC. Од 17. до 22. новембра Луноход 1 је прешао 197 метара, и током десет сесија комуникације са Земљом послао 14 фотографија површине из близине и 12 панорамских фотографија. Такође је анализирао Месечево тло. Последња комуникациона сесија са ровером догодила се 14. септембра 1971. године. Након 11 месеци истраживања[33] Луноход 1 је поставио рекорд по трајању мисије једног ровера који је оборен тек 30 година касније од стране ровера Спирит и Опортјунити.
Лунарно возило пројекта Аполо[уреди | уреди извор]

Агенција НАСА употребила је лунарно возило у три мисије пројекта Аполо – Аполо 15 (слетео на површину 30. јула 1971), Аполо 16 (слетео на површину 21. априла 1972) и Аполо 17 (слетео на површину 11. децембра 1972. године).[34] Возило је било напајано батеријама и имало четири точка (слика десно). Често су га називали и „Месечев баги“, јер је било слично возилу за рекреацију које има назив „баги“ (енгл. Dune buggy). Лунарно возило је до површине Месеца било спаковано на Лунарни модул, а по слетању би га астронаути расклопили. Возило је могло да превезе два астронаута, њихову опрему и узорке које сакупе. Три лунарна возила која су коришћена током пројекта Аполо остала су на површини Месеца, где се и данас налазе.
Луноход 2[уреди | уреди извор]

Луноход 2 је други лунарни ровер који је на површину Месеца слетео у оквиру совјетског програма Луноход. Ровер је започео истраживање површине 16. јануара 1973. године.[35] Тиме је постао тек друго роботизовано возило које је успешно слетело на неко небеско тело, након Лунохода 1. Совјетски Савез лансирао је Луноход 2 у склопу мисије Луна 21, 8. јанаура 1973. године, и ова летелица је у орбиту око Месеца успешно ушла 12. јанаура исте године. Након тога, летелица се 15. јануара лагано спустила на локацију близу источне границе Мора ведрине (лат. Mare Serenitatis). Луноход 2 се спустио низ две рампе са летелице Луна 21 у 01.14 UTC 16. јануара. Ровер је на површини био активан наредна четири месеца, и за то време је прешао око 39 km преко разних врста терена, укључујући и висије, брдашца и мање пукотине, и снимио 86 панорамских фотографија и преко 80.000 ТВ слика.[36][37][38] На основу броја обртаја точкова прво се сматрало да је ровер превалио 37 km, али су руски научници са Московског државног универзитета за геодезију и картографију (рус. Московский государственный университет геодезии и картографии, МIIГАиК) ту бројку увећали на 42,1–42,2 km на основу фотографија површине које је прикупио Лунар реконесанс орбитер агенције НАСА.[39][40] Након тога, исти научници су продискутовали на ову тему са својим америчким колегама и сагласили се да је ровер највероватније превалио 39 km, и ова бројка се од тада узима као званични податак.[41][42]
Проп-М ровер[уреди | уреди извор]
Совјетски лендери Марс-2 и Марс-3 са собом су носили мале ровере масе 4,5 kg, који би се по површини кретали на скијама и били повезани са лендером путем кабла дужине 15 метара. Две мале металне шипке служиле би за избегавање препрека, јер би радио-сигналима требало много времена да стигну до ровера и да се њим тако управља. Ровер би по слетању био достављен на површину роботском руком лендера, и кретао би се у видокругу телевизијских камера, застајући на сваких 1,5 m како би извршио мерења. Трагови који би остајали иза њега били би фотографисани како би се утврдио састав тла. Пошто је изгубљен контакт са обе мисије, ниједан од ових ровера није доспео на површину Марса.
Луноход 3[уреди | уреди извор]
Совјетски Савез је планирао да пошаље трећи ровер на површину Месеца 1977. године. Мисија је отказана јер није могла да добије место на некој ракети-носачу и зато што није било довољно новчаних средстава, иако је сам ровер у потпуности конструисан.
Марсоход[уреди | уреди извор]
Марсоход је био совјетски ровер тешке класе који је требало да истражује површину Марса, део мисије Марс 4НМ која је ка црвеној планети требало да буде лансирана ракетом-носачем Н-1 после 1973. године (по плановима из 1970. године). Међутим, како ова ракета у своја 4 лансирања није имала ниједно успешно, мисија је отказана.
Соџурнер[уреди | уреди извор]

Део мисије Марс патфајндер био је и мали ровер назван Соџурнер (енгл. Sojourner), први ровер који је успешно слетео на другу планету. Лендер Патфајндер ласнирала је америчка агенција НАСА 4. децембра 1996. године, и након више месеци крстарења у међупланетарном простору, успешно се спустио на површину Марса 4. јула 1997. године.[43] Од свог слетања до краја мисије Патфајндер је на Земљу послао преко 16.500 фотографија са лендера и 550 фотографија које је снимио Соџурнер. Уз то, одрађено је и 15 анализа стена и тла, а прикупљено је и обиље података о ветру и другим атмосферским условима на Марсу.[43]
Базна станица мисије Патфајндер последњи пут послала је сигнал ка Земљи 27. септембра 1997. године. Ровер је са Земљом комуницирао преко базне станице, тако да је и веза са њим изгубљена, мада је он радио без икаквих проблема у том тренутку. Соџурнер је током свог боравка на Марсу прешао мало преко 100 метара до тренутка када је изгубљен сигнал.[44] Последња команда која му је упућена била је да остане у месту до 5. октобра 1997. године (сол 91), а затим да оде са друге стране лендера.[45]
Бигл 2[уреди | уреди извор]
Бигл 2 била је сонда агенције ЕСА која је ка Марсу упућена заједно са орбитером Марс експрес 2. јуна 2003. године. Сонда је у суштини била лендер, али је поседовала малу „кртицу“ (PLanetary Undersurface TOol – PLUTO, или у преводу планетарни потповршински алат) која би била ослобођена уз помоћ роботске руке. PLUTO је био опремљен сложеним системом опруга који му је омогућавао да се креће по површини планете брзином од 20 mm/s (1,2 m/h), а његов главни задатак био је да се зарије у тло и сакупи узорак за анализу. Контакт са лендером Бигл 2 изгубљен је након одвајања од орбитера.

Спирит[уреди | уреди извор]
Спирит је био марсовски ровер, оперативан између 2004. и 2010. године.[46] Био је један од два ровера који су развијени у склопу мисије Ровери за истраживање Марса агенције НАСА. На површину Марса слетео је 4. јануара 2004. године у 04.35 UTC, три седмице пре свог брата близанца, ровера Опортјунити, који је слетео на другу страну планете. Ровери су били конструисани за мисију у трајању од 90 сола, а Спирит је наставио да истражује црвену планету читавих 1.832 сола (сол је дан на Марсу, износи 24 сата 39 минута и 35,244 секунде). Крајем 2009. године Спирит се заглавио у песку и последњи пут се јавио контроли мисије 22. марта 2010. године.
Активне мисије[уреди | уреди извор]
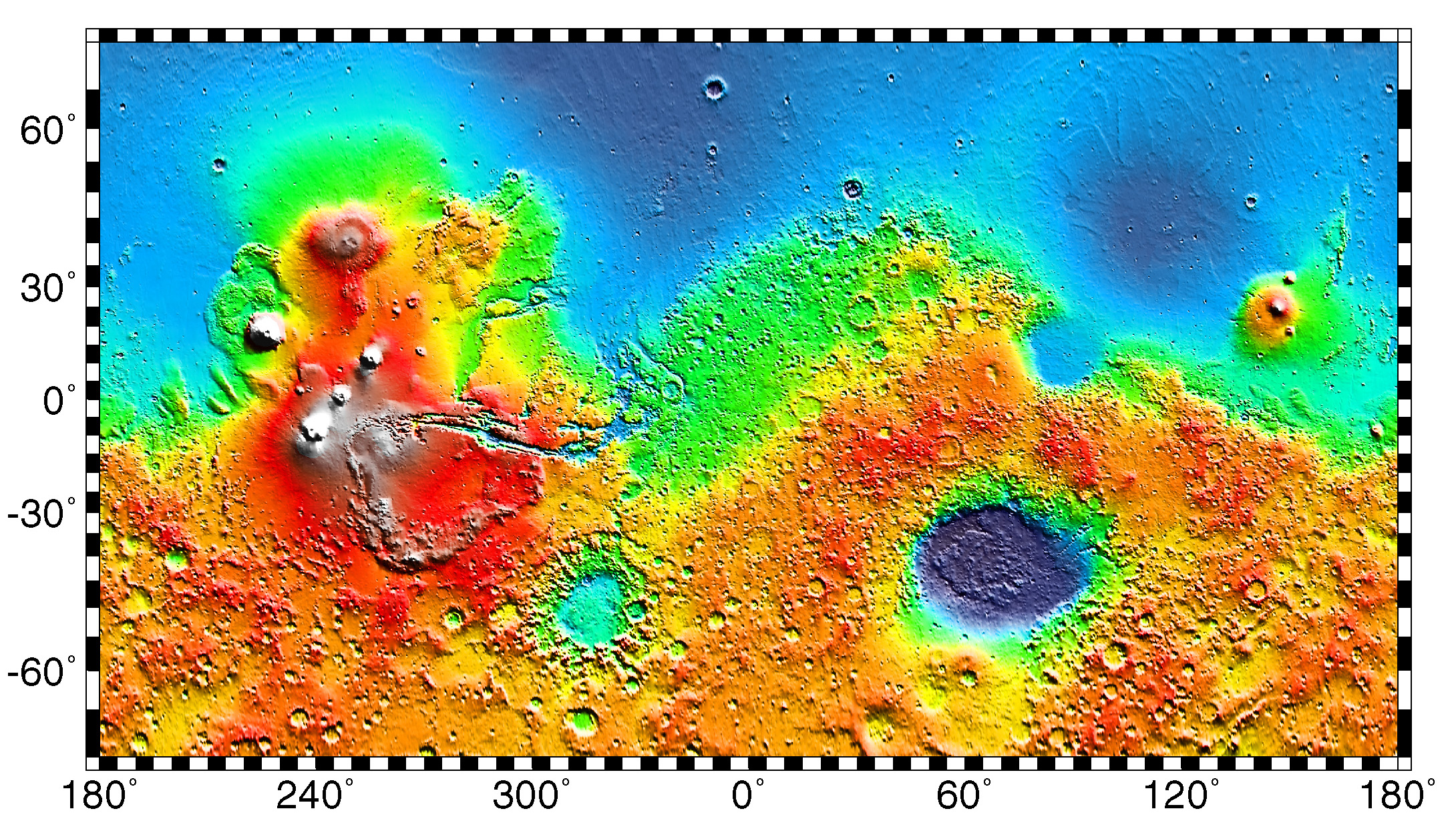
Мапа са местима слетања[уреди | уреди извор]
На следећој мапи планете Марс уграђене су хипервезе ка неки значајнијим географским одликама поред места на којима су слетели лендери и ровери. Само кликните на везу и отвориће вам се чланак на ту тему (напомена: тренутно је написан само чланак о планини Олимп). Север је у горњем делу. Висина терена – црвена (виша), жута (нула) и плава (нижа).

Опортјунити[уреди | уреди извор]
Опортјунити је роботизовани ровер који истражује планету Марс од јануара 2004. године. Део је мисије Ровери за истраживање Марса агенције НАСА. Са Земље је лансиран ракетом Делта II 7. јула 2003. године. На Марс је слетео 25. јануара 2004. године у 05.05 UTC по Земаљском времену (око 13.15 по локалном времену на Марсу), три седмице након свог брата близанца, ровера Спирит, који је слетео на другу страну планете. НАСА је 28. јула 2014. године објавила да је ровер Опортјунити оборио рекорд по дистанци коју је један ровер превалио на неком небеском телу, са пређених више од 40 km. Претходни рекорд од 39 km (по површини Месеца) држао је совјетски Луноход 2 дуже од 30 година.[47][48] (слика са подацима)
Кјуриосити[уреди | уреди извор]
Дана 26. новембра 2011. успешно је лансиран ровер Кјуриосити агенције НАСА, ракетом Атлас V. У августу 2012. године, након више месеци путовања кроз међупланетарни простор, ровер се успешно спустио на површину планете, у Гејл кратер, са до тада невиђеном прецизношћу.[49][50]
.jpg)
Кјуриосити је еволуција претходних успешних ровера – Спирит и Опортјунити. Већи је и масивнији, и садржи већи број научних инструмената. Напајање је такође другачије, јер за разлику од претходних ровера који су користили соларне панеле за пуњење батерија, Кјуриосити има мултимисиони радиоизотопни термоелектрични генератор. Ровер је пронашао доказе да је на овој локацији некада било воде у течном стању, да је у близини текла река и уливала се у велико језеро. Касније је ровер пронашао трагове метана на површини[51][52], а убрзо затим су детектована и органска једињења.[51][52]
Чанге 3[уреди | уреди извор]
Чанге 3 је кинеска истраживачка мисија на Месецу, у склопу које су лендер и ровер назван Јуту (кин: 玉兔). Пре ове мисије Кина је лансирала два орбитера, Чанге 1 и Чанге 2, који су из орбите фотографисали површину у потрази за погодним местом за слетање лендера и ровера. Након што су те мисије успешно окончане, лансирана је мисија Чанге 3, 1. децембра 2013. године ракетом-носачем Дуги марш 3Б. Летелица је у орбиту око Месеца ушла 6. децембра[53], а након тога слетела на површину 14. децембра[54], и тако постала прва сонда која се приземљила малом брзином на Месец после совјетске Луне 24 1976. године.[55] Одмах по слетању лендер је расклопио две рампе по којима је ровер Јуту сишао на површину у 20.35 UTC. Ровер се успешно удаљио од лендера, окренуо се и „погледао“ ка њему, а цео догађај био је уживо преношен на националној телевизији. Убрзо су активирани инструменти и ровер је започео испитивања тла. Након прве лунарне ноћи, која траје 14 дана, отказали су точкови ровера, тако да је остао непокретан, али је наставио да прикупља податке преко својих научних инструмената.[56] Цела мисија део је друге фазе Кинеског програма за истраживање Месеца, у оквиру којег ће бити лансиране мисије Чанге 4 и Чанге 5. Прва је идентична мисији Чанге 3 (лендер и ровер), док ће друга мисија слетети на Месец 2017. године, сакупити и вратити узорке тла на Земљу (око 2 kg узорака).[57][58][59]
Планирани ровери[уреди | уреди извор]
Чандрајан 2[уреди | уреди извор]
Чандрајан 2 (на санскриту: चन्द्रयान-२) је друга по реду истраживачка мисија коју ће ка Месецу упутити Индија. Мисију чине орбитер, лендер и ровер. Планирано је да мисија буде лансирана крајем 2016. или почетком 2017. године.[60][61] Индијска организација за истраживање свемира, која је одговорна за конструкцију, лансирање и операцију мисије, изјавила је да ће мисија Чандрајан 2 бити платформа за тестирање нових технологија и употребиће неке експерименте који су скоро развијени.[62][63][64]

Лунарни ровер (луноход) биће у стању да подигне стене и анализира њихов састав. Сакупљени подаци биће послати на Земљу преко орбитера мисије Чандрајан 2.[65]
Егзомарс ровер[уреди | уреди извор]
Европска свемирска агенција тренутно ради на изградњи ровера који ће слетети на Марс. Ровер је део заједничке мисије са руском ФКА. Габаритима ће бити између ровера за истраживање Марса и ровера Кјуриосити. Биће напајан соларним панелима и великим бројем научних инструмената, међу којима је и бушилица којом ће извадити узорак тла са дубине од 2 метра. Лансирање је планирано за 2018. годину ракетом-носачем Протон,[66] али је одложено за 2020. због мањка средстава и спорих административних одлука на обе стране.
Марсовски ровер 2020[уреди | уреди извор]
Марсовски ровер 2020. је радни назив мисије агенције НАСА планиране за лансирање 2020. године.[67] Званичан назив мисије обично се изабере пар година пред лансирање путем јавног гласања у којем учествују ученици основних и средњих школа из САД. Планирано је да спроведе истраживања везана за астробиолошка окружења која су постојала на Марсу, испита геолошке процесе на површини и геолошку историју, као и да трага за доказима да су биолошки трагови могли да опстану до данас у стенама Марса.[68][69] Агенција НАСА је објавила да започиње рад на овој мисији 4. децембра 2012. на састанку Америчке геофизике уније у Сан Франциску.[70] Конструкција ровера биће скоро иста као ровер Кјуриосити, али ће садржати другачије научне експерименте.[71] Скоро 60 тимова[72][73] се пријавило са идејама за инструменте, и НАСА је, 31. јула 2014. године, објавила коначан списак инструмената који ће бити уграђени.[74][75] Међу седам инструмената је и један којим ће научници покушати да изолирају кисеоник из атмосфере Марса.[68][69]
Види још[уреди | уреди извор]
Референце[уреди | уреди извор]
- ^ „Exploring The Planets - Tools of Exploration - Rovers”. Air and Space Museum. 2002. Архивирано из оригинала 25. 07. 2009. г. Приступљено 3. 1. 2013.
- ^ а б Schirber, Michael (8. 7. 2012). „Rovers of the future may make decisions on their own”. Astrobiology Magazine. Mother Nature Network. Приступљено 10. 7. 2012.
- ^ Caponiti, Alice (јануар 2008). „Multi-Mission Radioisotope Thermoelectric Generator” (PDF) (на језику: (језик: енглески)). Архивирано из оригинала (PDF) 17. 8. 2012. г. Приступљено 14. 2. 2012. „Мултимисиони радиоизотопни термоелектрични генератор”
- ^ Brown, Dwayne. „Radioisotope Power and Heating for Mars Surface Exploration” (PDF) (на језику: (језик: енглески)). НАСА. Архивирано из оригинала (pdf) 12. 10. 2012. г. Приступљено 14. 2. 2012. „Напајање и грејање радиоизотопима за истраживање Марса”
- ^ „Mars Science Laboratory will use a radioisotope power system” (на језику: (језик: енглески)). ЈПЛ. Приступљено 14. 2. 2012. „МНЛ ће користити нуклеарни систем напајања”
- ^ „Mars Science Laboratory will use a radioisotope power system” (на језику: (језик: енглески)). Приступљено 14. 2. 2012.
- ^ „New Mars Rover to Feature Morse Code” (на језику: (језик: енглески)). ARRL. 23. 3. 2011. Приступљено 14. 2. 2012. „Морзеова азбука на роверу”
- ^ Malin, Michael C. „Mast Camera (Mastcam)” (на језику: (језик: енглески)). ЈПЛ. Архивирано из оригинала 08. 08. 2012. г. Приступљено 23. 2. 2012. „Стубна камера”
- ^ Edgett, Kenneth S. „Mars Hand Lens Imager (MAHLI)” (на језику: (језик: енглески)). Архивирано из оригинала 15. 08. 2012. г. Приступљено 23. 2. 2012. „Камера роботске руке”
- ^ Malin, Michael C. „Mars Descent Imager (MARDI)” (на језику: (језик: енглески)). Архивирано из оригинала 07. 08. 2012. г. Приступљено 23. 2. 2012. „Камера за сликање при слетању”
- ^ „Mastcam Instrument Description” (на језику: (језик: енглески)). Malin Space Science Systems. Приступљено 23. 2. 2012. „Опис инструмента MastCam”
- ^ Stern, Alan & Green, Jim (8. 11. 2007). „Mars Science Laboratory Instrumentation Announcement from Alan Stern and Jim Green, NASA Headquarters” (на језику: (језик: енглески)). marstoday.com. Архивирано из оригинала 17. 8. 2012. г. Приступљено 23. 2. 2012.
- ^ „Mars Hand Lens Imager (MAHLI)” (на језику: (језик: енглески)). Архивирано из оригинала 15. 08. 2012. г. Приступљено 23. 2. 2012.
- ^ „MARS SCIENCE LABORATORY (MSL) MAST CAMERA (MASTCAM)” (на језику: (језик: енглески)). Malin Space Science Systems (MSSS). Приступљено 24. 2. 2012.
- ^ David, Leonard (28. 3. 2011). „NASA Nixes 3-D Camera for Next Mars Rover” (на језику: (језик: енглески)). SPACE.com. Приступљено 24. 2. 2012. „Неће бити 3Д камере на роверу”
- ^ „Mastcam Instrument Description” (на језику: (језик: енглески)). Приступљено 23. 2. 2012.
- ^ „Mars Descent Imager (MARDI)” (на језику: (језик: енглески)). Архивирано из оригинала 07. 08. 2012. г. Приступљено 23. 2. 2012.
- ^ „Mars Descent Imager (MARDI) Update” (на језику: (језик: енглески)). MSSS. 12. 11. 2007. Архивирано из оригинала 04. 09. 2012. г. Приступљено 23. 2. 2012.
- ^ Wiens, Roger C. „Chemistry & Camera (ChemCam)” (на језику: (језик: енглески)). ЈПЛ. Архивирано из оригинала 20. 07. 2011. г. Приступљено 26. 2. 2012. „Хемијска камера”
- ^ „MSL ChemCam on Mars” (на језику: (језик: енглески)). ЈПЛ. Приступљено 26. 2. 2012.
- ^ Wiens, Roger C. „Chemistry & Camera (ChemCam)” (на језику: (језик: енглески)). Архивирано из оригинала 20. 07. 2011. г. Приступљено 26. 2. 2012. „Хемијска камера”
- ^ „Mars Science Laboratory Rover in the JPL Mars Yard” (на језику: (језик: енглески)). ЈПЛ. Архивирано из оригинала 10. 05. 2009. г. Приступљено 22. 2. 2012. „Интерактивни материјал”
- ^ „Eyes and Other Senses” (на језику: (језик: енглески)). ЈПЛ. Приступљено 22. 2. 2012. „Очи ровера и друга чула”
- ^ Klingelhöfer, G.; Bernhardt, B.; Foh, J.; Bonnes, U.; Rodionov, D.; De Souza P. A.; Schroder, C.; Gellert, R.; Kane, S.; Gutlich P.; Kankeleit E. (2002). „The miniaturized Mössbauer spectrometer MIMOS II for extraterrestrial and outdoor terrestrial applications: A status report”. Hyperfine Interactions. 144: 371—379. Bibcode:2002HyInt.144..371K. doi:10.1023/A:1025444209059.
- ^ Klingelhoefer (2007). „THE MINIATURISED MOESSBAUER SPECTROMETER MIMOS II: APPLICATION FOR THE "PHOBOS-GRUNT" MISSION.” (PDF).
- ^ R. Rieder; R. Gellert; J. Brückner; G. Klingelhöfer; G. Dreibus; A. Yen; S. W. Squyres (2003). „The new Athena alpha particle X-ray spectrometer for the Mars Exploration Rovers”. J. Geophysical Research. 108: 8066. Bibcode:2003JGRE..108.8066R. doi:10.1029/2003JE002150.
- ^ „Mars Science Laboratory Sample Acquisition, Sample Processing and Handling: Subsystem Design and Test Challenges” (PDF) (на језику: (језик: енглески)). Приступљено 9. 1. 2015.
- ^ „Arm and Hand” (на језику: (језик: енглески)). ЈПЛ. Приступљено 9. 1. 2015.
- ^ „Curiosity Stretches its Arm” (на језику: (језик: енглески)). ЈПЛ. Архивирано из оригинала 23. 08. 2012. г. Приступљено 9. 1. 2015.
- ^ „MSL-PIP” (PDF) (на језику: (језик: енглески)). Приступљено 9. 1. 2015.
- ^ „MARS SCIENCE LABORATORY ROBOTIC ARM” (PDF) (на језику: (језик: енглески)). Приступљено 9. 1. 2015.
- ^ „Lunar Lost & Found: The Search for Old Spacecraft”. www.space.com. Приступљено 18. 3. 2009.
- ^ „Luna 17 and Lunokhod 1”. www.zarya.info. Архивирано из оригинала 15. 05. 2011. г. Приступљено 23. 8. 2009.
- ^ „Experiment: Lunar Rover Vehicle”. Ares.jsc.nasa.gov. Архивирано из оригинала 20. 3. 2009. г. Приступљено 18. 3. 2009.
- ^ „Luna 21 and Lunokhod 2”. www.zarya.info. Архивирано из оригинала 29. 03. 2019. г. Приступљено 23. 8. 2009.
- ^ Chaikin, Andrew (1. 3. 2004). „The Other Moon Landings”. Air & Space/Smithsonian. Архивирано из оригинала 11. 5. 2014. г. Приступљено 25. 5. 2013.
- ^ Page, Lewis (16. 3. 2012). „New NASA snap of game developer's electric cart FOUND ON MOON: Probe in low pass over Garriott's radioactive tub-rover”. The Register. Приступљено 25. 5. 2013.
- ^ „Lunokhod 2 Revisited”. NASA. 13. 3. 2012. Архивирано из оригинала 15. 12. 2013. г. Приступљено 25. 5. 2013.
- ^ Lakdawalla, Emily (21. 6. 2013). „Is Opportunity near Lunokhod's distance record? Not as close as we used to think!”. The Planetary Society. Приступљено 26. 6. 2013.
- ^ Witze, Alexandra (19. 6. 2013). „Space rovers in record race”. Nature News. Приступљено 26. 6. 2013.
- ^ „It's Official! NASA confirms Mars Opportunity rover has broken the off-world driving record”. theweathernetwork.com. 29. 7. 2014. Приступљено 4. 1. 2015.
- ^ „Trundling Across the Moon”. Lunar Reconnaissance Orbiter Camera. 23. 5. 2014. Приступљено 4. 1. 2015.
- ^ а б „Mars Pathfinder”. NASA. Архивирано из оригинала 23. 06. 2015. г. Приступљено 18. 3. 2009.
- ^ „Sojourner”. spacepioneers.msu.edu. Архивирано из оригинала 20. 3. 2015. г. Приступљено 4. 1. 2015.
- ^ „Sol 89 (3 October 1997) Images”. mars.jpl.nasa.gov. 3. 10. 1997. Приступљено 4. 1. 2015.
- ^ Nelson, Jon. „Mars Exploration Rover - Spirit”. NASA. Архивирано из оригинала 28. 01. 2018. г. Приступљено 2. 2. 2014.
- ^ Webster, Guy; Brown, Dwayne (28. 7. 2014). „NASA Long-Lived Mars Opportunity Rover Sets Off-World Driving Record”. NASA. Приступљено 29. 7. 2014.
- ^ Knapp, Alex (29. 7. 2014). „NASA's Opportunity Rover Sets A Record For Off-World Driving”. Forbes. Приступљено 29. 7. 2014.
- ^ Staff, NASA (26. 11. 2011). „Mars Science Laboratory”. NASA. Приступљено 26. 11. 2011.
- ^ Associated Press (26. 11. 2011). „NASA Launches Super-Size Rover to Mars: 'Go, Go!'”. New York Times. Приступљено 26. 11. 2011.
- ^ а б Webster, Guy; Jones, Nancy Neal; Brown, Dwayne (16. 12. 2014). „NASA Rover Finds Active and Ancient Organic Chemistry on Mars”. NASA. Приступљено 16. 12. 2014.
- ^ а б Chang, Kenneth (16. 12. 2014). „‘A Great Moment’: Rover Finds Clue That Mars May Harbor Life”. New York Times. Приступљено 16. 12. 2014.
- ^ „China moon rover enters lunar orbit”. spacedaily.com. 6. 12. 2013.
- ^ „China lands Jade Rabbit robot rover on Moon”. BBC. 14. 12. 2013.
- ^ Barbosa, Rui C. (14. 12. 2013). „China's Chang'e-3 and Jade Rabbit duo land on the Moon”. NASAspaceflight.com. Приступљено 14. 12. 2013.
- ^ McKirdy, Euan (13. 2. 2014). „Down but not out: Jade Rabbit comes back from the dead”. CNN.
- ^ „China Celebrates Lunar Probe and Announces Return Plans”. New York Times. 16. 12. 2013. Приступљено 16. 12. 2013.
- ^ „China plans to launch Chang'e 5 in 2017”. Xinhuanet. 16. 12. 2013.
- ^ „China's Lunar Probe Tester Ready for Chang'e 5 Mission”. CRIENGLISH.com. 11. 8. 2014. Архивирано из оригинала 18. 08. 2017. г. Приступљено 27. 12. 2014.
- ^ „Chandrayaan-2: India to go it alone”. The Hindu. 22. 1. 2013.
- ^ „India to launch Chandrayaan- II by 2016-17”. Hindustan Times. 10. 1. 2014. Архивирано из оригинала 17. 03. 2014. г. Приступљено 27. 12. 2014.
- ^ „Chandrayaan-2 to be finalised in 6 months”. The Hindu. 7. 9. 2007. Архивирано из оригинала 23. 10. 2008. г. Приступљено 22. 10. 2008.
- ^ „Chandrayaan-II will try out new ideas, technologies”. The Week. 7. 9. 2010. Архивирано из оригинала 14. 07. 2011. г. Приступљено 7. 9. 2010.
- ^ „Landing spots for Chandrayaan-2 identified”. DNA India. 21. 2. 2014. Приступљено 23. 2. 2014.
- ^ „ISRO plans Moon rover”. Chennai, India: The Hindu. 4. 1. 2007. Архивирано из оригинала 14. 09. 2007. г. Приступљено 22. 10. 2008.
- ^ „ExoMars Rover ESA Portal”. ESA.
- ^ Nelson, Jon. „Mars Exploration Program: 2020 Mission”. NASA. Архивирано из оригинала 20. 07. 2014. г. Приступљено 13. 6. 2014.
- ^ а б Chang, Alicia (9. 7. 2013). „Panel: Next Mars rover should gather rocks, soil”. AP News. Приступљено 12. 7. 2013.
- ^ а б Cowing, Keith (21. 12. 2012). „Science Definition Team for the 2020 Mars Rover”. NASA. SpaceRef. Архивирано из оригинала 03. 02. 2013. г. Приступљено 21. 12. 2012.
- ^ Harwood, William (4. 12. 2012). „NASA announces plans for new $1.5 billion Mars rover”. CNET. Приступљено 5. 12. 2012. „Using spare parts and mission plans developed for NASA's Curiosity Mars rover, the space agency says it can build and launch a new rover in 2020 and stay within current budget guidelines.”
- ^ Amos, Jonathan (4. 12. 2012). „Nasa to send new rover to Mars in 2020”. BBC News. Приступљено 5. 12. 2012.
- ^ Webster, Guy; Brown, Dwayne (21. 1. 2014). „NASA Receives Mars 2020 Rover Instrument Proposals for Evaluation”. NASA. Приступљено 21. 1. 2014.
- ^ Timmer, John (1. 8. 2014). „NASA announces the instruments for the next Mars rover”. NASA. Приступљено 4. 1. 2015.
- ^ Brown, Dwayne (31. 7. 2014). „RELEASE 14-208 - NASA Announces Mars 2020 Rover Payload to Explore the Red Planet as Never Before”. NASA. Приступљено 31. 7. 2014.
- ^ Brown, Dwayne (31. 7. 2014). „NASA Announces Mars 2020 Rover Payload to Explore the Red Planet as Never Before”. NASA. Приступљено 31. 7. 2014.
Спољашње везе[уреди | уреди извор]
| Нормативна контрола: Државне |
|---|