
Orbitalni istraživač Marsa
| Orbitalni istraživač Marsa (Mars Reconnaissance Orbiter) | |
|---|---|
|
| |
| Operator | NASA/JPL |
| Proizvođač | Lokid Martin/JPL |
| Tip misije | Orbiter |
| Datum lansiranja | 12. avgust 2005. u 11.43 UTC |
| Kraj misije | U toku (>10 godina[1]) |
| Raketa-nosač | Atlas V 401 |
| Mesto lansiranja | Svemirski centar Kenedi |
| Masa | 2.180 kg |
| Izvor napajanja | solarni paneli |
| Snaga napajanja | 1.000 W |
| Vrsta orbite | polarna |
| Ulazak u orbitu | 10. mart 2006. u 21.24 UTC |
| Inklinacija orbite | 93 ° |
| Orbitalni period | 122 minuta |
| Apoapsis | 320 km |
| Periapsis | 255 km |
| Međunarodna oznaka | 2005-029A |
| Vebsajt | marsprogram.jpl.nasa.gov |
|
| |


Orbitalni istraživač Marsa (engl. Mars Reconnaissance Orbiter), ili skraćeno MRO (engl. MRO), svemirska je sonda svemirske agencije NASA napravljena da vrši izviđanje i istraživanje Marsa iz orbite. Kada je ušla u Marsovu orbitu postala je šesta operativna sonda u orbiti planete, čime je oboren rekord u broju sondi koje se nalaze u orbiti oko Marsa. Ovu svemirsku sondu vrednu 720 miliona dolara napravila je kompanija Lokid Martin uz nadzor laboratorije za svemirsku propulziju (dela kalifornijskog instituta za tehnologiju). Lansiranje je izvršeno 12. avgusta 2005. godine, a 10. marta 2006. sonda je ušla u orbitu Marsa. U novembru 2006. nakon pet meseci usporavanja pomoću gornje atmosfere Marsa, MRO je ušao u konačnu nisku orbitu i otpočeo naučna istraživanja.
MRO ima veliki broj naučnih instrumenata kao što su kamere, spektrometar i radar, koji se koriste za izučavanje topografije, minerala u tlu i leda na Marsu. Ova misija olakšava dolazak drugih tako što dnevno prati vremenske uslove, proučava moguća mesta za sletanje i omogućava brz transfer velike količine podataka sa površine ka Zemlji. Komunikacioni sistem MRO će preneti više podataka od svih svemirskih sondi lansiranih ka drugim planetama do danas.[2]
Sonda je u martu 2016. godine proslavila 10 godina u orbiti oko crvene planete. Za to vreme napravila je preko 45.000 orbita, prevalila više od 1,53 milijarde kilometara, ka Zemlji poslala preko 264 TB podataka (>216.000 fotografija).[3]
Pre lansiranja
[uredi | uredi izvor]MRO je jedna od dve misije razmatrane za lansiranje ka Marsu 2003. godine, međutim, tokom selekcije orbiter je ustupio mesto misiji tada poznatoj kao MER (Mars eksplorejšn rovers - Roveri za istraživanje Marsa).[4] Misija orbitera je zakazana za naredni mogući lansirni prozor ka Marsu 2005. godine i dat joj je konačan naziv.
MRO je konstruisan na osnovu veoma uspešne misije Mars global survejor (engl. Mars Global Surveyor) da obavi nadgledanje Marsa iz orbite. U ranoj fazi konstrukcije bilo je poznato samo da će letelica imati kameru velike rezolucije.
U oktobru 2001. godine NASA je izabrala Lokid Martin za izradu letelice, a do kraja te godine izabrani su i svi instrumenti koji će biti ugrađeni. Tokom faze izrade nije bilo kašnjenja niti zastoja bilo kakve prirode.
Ciljevi misije
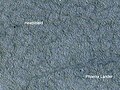
[uredi | uredi izvor]Po planu misije, naučne operacije trebalo je da traju dve Zemaljske godine, od novembra 2006. do novembra 2008. Jedan od glavnih ciljeva je da se mapira pejzaž Marsa pomoću kamere visoke rezolucije kako bi mogla da se izaberu mesta za sletanje budućih misija. MRO je igrao ključnu ulogu u odabiru mesta za sletanje misije Feniks koja je istražila polarni region Marsa.[5] Prvobitno mesto sletanja je fotografisano kamerom visoke rezolucije i pomoću tih fotografija je otkriveno da je to mesto puno velikih stena. Rover Marsova naučna laboratorija, koja je lansirana u novembru 2011, sleteće u Gejl krater, koji je takođe prvo ispitao MRO.

MRO koristi svoje instrumente i za izučavanje klime Marsa, vremenskih uslova, atmosfere i geologije, kao i za potragu za tečnom vodom u polarnim kapama i ispod površine. Takođe, jedan od zadataka misije jeste i da proba da nađe ostatke neuspelih misija iz prošlosti uključujući Marsov polarni lender i Bigl 2 koji su se srušili negde blizu polarnih kapa.[6] Nakon završetka primarnih naučnih istraživanja, zadatak produžene misije biće da služi kao podrška drugim misijama tokom ulaska u atmosferu, za navigaciju i za prenos podataka sa površine ka Zemlji.
Lansiranje i ulazak u orbitu
[uredi | uredi izvor]MRO je uspešno lansiran 12. avgusta 2005. raketom Atlas V-401 sa svemirskog centra Kenedi na Floridi. Poslednji, Kentaur stepen rakete završio je svoje sagorevanje nakon 56 minuta i ubacio MRO na međuplanetarnu transfernu orbitu prema Marsu.[7]
MRO je krstario međuplanetarnim prostorom sedam i po meseci pre nego što je stigao do Marsa. Tokom tog puta većina naučnih eksperimenata i instrumenata je testirana i kalibrisana. Da bi se obezbedio pravilan ulazak u orbitu po dolasku do Marsa, planirana su četiri manevra za korekciju putanje, a razmišljalo se i o petom. Međutim, samo tri manevra za korekciju su bila potrebna tako da se uštedelo gorivo koje se može kasnije iskoristiti za produženje misije.[8]

MRO je započeo ulazak u orbitu prilaskom Marsu 10. marta 2006. i preletom iznad njegove južne polulopte na visini od 370–400 km. Svih šest glavnih motora upaljeni su tokom 27 minuta da bi usporili letelicu sa ~2.900 m/s na ~1.900 m/s. Rezervoar helijuma je bio hladniji od očekivanog, što je smanjilo pritisak u rezervoaru za oko 21 kPa. Ovo smanjenje pritiska je uticalo da potisak motora opadne za 2%, ali je MRO automatski kompenzovao i produžio rad motora za 33 sekunde.[9] Nakon ovog procesa MRO je ušao u izduženu eliptičnu polarnu orbitu sa periodom rotacije od oko 35,5 časova. MRO je 30. marta 2006. godine započeo proces aerokočenja, postupak iz tri etape koji duplo smanjuje količinu goriva potrebnu da se postigne niža, kružna orbita sa kraćim periodom rotacije. U septembru su se motori još jednom upalili da se dotera orbita u skoro kružnu, 250 sa 316 km iznad površine planete.[10]
Instrumenti
[uredi | uredi izvor]Fotografski naučni eksperiment visoke rezolucije
[uredi | uredi izvor]
Kamera HiRISE (engl. High Resolution Imaging Science Experiment) je teleskop reflektujućeg tipa prečnika 0,5 m, najveći ikada poslat na misiju u duboki svemir i ima rezoluciju od 1 mikroradijana ili 0,3 m sa visine od 300 km. U poređenju, satelitski snimci Zemlje su dostupni u rezoluciji 0,5 m, a satelitski snimci u Gugl Zemlji su dostupni u rezoluciji od 1 m.[11] HiRISE snima fotografije u tri talasne dužine, 400 do 600 nm (plava - zelena ili P-Z), 550 do 850 nm (crvena) i 800 do 1.000 nm (infracrvena - IC).[12]

Crvene slike u boji su 20.264 piksela (6 km široke), dok su P-Z i IC 4.048 piksela (1,2 km široke). HiRISE-ov kompjuter čita ove linije u skladu sa brzinom u odnosu na površinu planete tako da su slike u teoriji neograničene u dužinu. Praktično međutim, slike su ograničene memorijskim kapacitetom kompjutera od 28 gigabajta i nominalna maksimalna veličina je 20.000 × 40.000 piksela (800 megapiksela) i 4.000 × 40.000 piksela (160 megapiksela) za P-Z i IC slike. Svaka slika veličine 16,4 gigabajta se kompresuje na 5 gigabajta pre slanja ka Zemlji. Da bi se olakšalo mapiranje potencijalnih mesta za sletanje budućih misija HiRISE može da proizvede stereo parove slika iz kojih se može izračunati visina pojedinih oblasti do ±0,25 m.[13] HiRISE instrument je konstruisala korporacija Bol erospejs end teknolodžiz.
Kamera konteksta
[uredi | uredi izvor]CTX (engl. Context Camera) pruža crno-bele fotografije (500 do 1.000 nm) sa rezolucijom piksela do oko 6 m. CTX je dizajnirana da obezbedi dodatne mape za detaljnija nadgledanja HiRISE-a i CRISM-a, a takođe se koristi za izradu mozaika velikih oblasti površine Marsa, nadgledanje određenih oblasti tokom vremena i praćenje promena tih oblasti, kao i za stereo nadgledanje (3D) ključnih regiona i potencijalnih mesta za sletanje.[14] Optički deo instrumenta se sastoji od Maksutov Kasegrejn teleskopa žižne daljine 350 mm sa CCD senzorom rezolucije 5.064 piksela. Instrument snima fotografije tla širine 30 km i ima dovoljno unutrašnje memorije da skladišti fotografiju dužine 160 km pre nego što je učita u glavni računar. Kameru je napravio i njom upravlja Malin spejs sajens sistems. CTX je mapirao 50% površine Marsa do februara 2010. godine.[15]
Fotografisanje Marsa u boji
[uredi | uredi izvor]
MARCI (engl. Mars Color Imager) je širokougaona kamera niske rezolucije koja posmatra Mars u pet vidljivih i dve ultraljubičaste talasne dužine.[16] Svakog dana, MARCI uslika 84 fotografije i proizvede globalnu mapu sa rezolucijom piksela od 1 do 10 km. Ova mapa obezbeđuje dnevni vremenski izveštaj za Mars, pomaže u karakterizaciji sezonskih i godišnjih promena i mapira prisustvo vodene pare i ozona u atmosferi.[17] Kameru je napravio i njom upravlja Malin spejs sajens sistems.
Kompaktan spektrometar za izviđanje Marsa
[uredi | uredi izvor]
CRISM (engl. Compact Reconnaissance Imaging Spectrometer for Mars) instrument je spektrometar vidljive i infracrvene (VIC) svetlosti koji se koristi da napravi detaljne mape površinske mineralogije Marsa. Radi na opsegu od 370 do 3.920 nm talasne dužine, meri spektar u 544 kanala (svaki 6,55 nm širok), i ima rezoluciju od 18 m sa visine od 300 km. CRISM se koristi za identifikaciju minerala i hemikalija koje ukazuju na trenutno ili prošlo postojanje vode na površini Marsa. U ove minerale spadaju gvožđe, oksidi, silikati i karbonati, koji imaju karakteristične šablone svoje vidljive – infracrvene energije.[18]
Izviđač Marsove klime
[uredi | uredi izvor]MCS (engl. Mars Climate Sounder) je spektrometar sa jednim vidljivim – infracrvenim kanalom (0,3 do 3,0 μm) i osam infracrvenih (12 do 50 μm) kanala. Ovi kanali su izabrani zbog merenja temperature, pritiska, vodene pare i nivoa prašine. MCS posmatra atmosferu na horizontu Marsa (viđenu sa pozicije letelice) razlažući je u vertikalne delove i izvršava merenja unutar svakog dela u segmentima od po 5 km. Ova merenja se sklapaju u dnevni vremenski izveštaj da bi se pokazale osnovne promenljive u atmosferi: temperatura, pritisak, vlažnost i koncentracija prašine.[19]
Potpovršinski radar plitkog prodora
[uredi | uredi izvor]
SHARAD (engl. Shallow Subsurface Radar) je radar čije zračenje prodire plitko ispod površine Marsa. Konstruisan je tako da izuči unutrašnju strukturu Marsovih polarnih kapa. Takođe prikuplja podatke sa celokupne površine planete o podzemnim slojevima leda, stena i potencijalno tečne vode koja bi mogla da bude dostupna sa površine. SHARAD koristi visokofrekventne radio-talase između 15 i 25 MHz, opseg koji omogućava da se razaznaju slojevi od svega 7 m do maksimalne dubine od 1 km. Postiže horizontalnu rezoluciju od 0,3 do 3 km.[20] SHARAD je konstruisan da radi u saradnji sa MARSIS radarom, ugrađenim na sondu Mars ekspres Evropske svemirske agencije, koji ima manju rezoluciju, ali prodire do mnogo veće dubine u tlo. Oba radara je konstruisala Italijanska svemirska agencija.
Tehnički instrumenti
[uredi | uredi izvor]Pored optičkih instrumenata, MRO poseduje još dosta tehničkih instrumenata. Paket za istraživanje gravitacionog polja (engl. Gravity Field Investigation Package) detektuje varijacije u magnetnom polju Marsa mereći promene u brzini kretanja letelice. Te promene brzine se otkrivaju pri merenju Doplerovog efekta kod radio-signala primljenih na Zemlji. Ovaj paket takođe sadrži osetljive akcelerometre koji se koriste za utvrđivanje gustine atmosfere planete pri procesu aerokočenja.[21]
Elektra je radio ultravisoke frekvencije definisan softverom koji se koristi za komunikaciju sa drugim letelicama pri prilazu, sletanju i operacijama na površini. Uz protokolom kontrolisanu vezu između letelica od 1 kbit/s do 2 Mbit/s, Elektra takođe pruža prikupljanje Doplerovih podataka, snimanje metodom otvorene petlje i usluge tačnog vremena veoma velike preciznosti. Doplerove informacije kod letelica koje su na putu ka Marsu mogu biti korišćene za preciznije usmeravanje pri ulasku u atmosferu ili za podešavanje trajektorije pri sletanju na površinu. Doplerove informacije o letelicama koje su sletele će takođe pomoći naučnicima da precizno odrede položaj lendera i rovera na površini Marsa. MER roveri koriste prethodnu generaciju UHF radio transmisije koja im pruža slične mogućnosti kroz Mars Odisej orbiter.
Elektra radio je korišćen za transmisiju podataka sa rovera Spirit i Oportjuniti ali je tek počeo da radi punim kapacitetom po dolasku misije Feniks. Pošto je Elektra radio definisan softverom do nivoa modema, nova modulacija, kodovanje ili funkcije protokola se mogu dodavati ili ažurirati dok je letelica u orbiti oko Marsa.[22]
Optička kamera za navigaciju (engl. Optical Navigation Camera) fotografiše mesece Marsa, Fobos i Deimos, i njihovim kretanjem u odnosu na zvezde u pozadini tačno određuje orbitu MRO letelice. Iako slikanje meseca nije kritično za misiju, uključeno je kao test tehnologije za buduće orbitere i sletanje lendera.[23]
Inženjerski podaci
[uredi | uredi izvor]Struktura
[uredi | uredi izvor]
Radnici Lokid Martin spejs sistemsa u Denveru sklopili su strukturu letelice i prikačili instrumente. Instrumenti su konstruisani u laboratoriji za mlaznu propulziju (JPL), Lunarnoj i planetarnoj laboratoriji univerziteta Arizone, Laboratoriji za primenjenu fiziku Džon Hopkins univerziteta, Italijanskoj svemirskoj agenciji u Rimu, i firmi Malin spejs sajens sistems u San Dijegu. Ukupni troškovi letelice iznosili su 720 miliona dolara.
Struktura letelice je većinom napravljena od ugljeničnih kompozita i aluminijumskih ploča u obliku saća. Titanijumski rezervoar zauzima većinu zapremine i mase letelice i obezbeđuje glavninu strukturnog integriteta. Ukupna masa letelice je manje od 2.180 kg, dok je masa letelice bez goriva 1.031 kg.[24]
Sistemi napajanja
[uredi | uredi izvor]
MRO dobija svu električnu energiju od dva solarna panela, svaki od njih se može okretati nezavisno oko dve ose (gore-dole ili levo-desno). Svaki od panela je dimenzija 5,35 × 2,53 m i ima površinu od 9,5 m² prekrivenu sa 3.744 individualnih fotonaponskih ćelija. Ove solarne ćelije visoke efikasnosti su u stanju da pretvore više od 26% sunčeve energije u električnu i kada su povezane zajedno proizvode 32 volta. Na Marsu, dva panela proizvode 1.000 vati, dok bi u orbiti oko Zemlje proizvodili 3.000 vati jer je Zemlja bliža Suncu.[25]
MRO ima dve nikl-vodonične punjive baterije koje se koriste za napajanje letelice u periodu kada nije izložena sunčevoj svetlosti. Svaka baterija može da skladišti 50 amper-sati. Pun kapacitet baterija ne može biti iskorišćen zbog naponskog nivoa letelice, ali omogućava operatorima da produže život baterijama što je veoma važno – uzrok većine neuspeha kod misija u svemir je otkaz baterija. Inženjeri su predvideli da će samo 40% kapaciteta baterija biti potrebno tokom misije.[26]
Elektronski sistemi
[uredi | uredi izvor]Glavni kompjuter MRO je procesor RAD750 koji radi na 133 MHz, ima 10,4 miliona tranzistora i 32-bita. Ovaj procesor je radijaciono kaljen (otporan na radijaciju) sa posebno napravljenom matičnom pločom. RAD750 je naslednik RAD6000 procesora koji su koristile mnoge prethodne misije. Ove karakteristike su možda slabašne u odnosu na računare koje ljudi danas koriste u svojim domovima, međutim on je ekstremno pouzdan, otporan i može da radi u dubokom svemiru gde često divljaju solarne oluje.
Podaci se smeštaju na fleš memoriju kapaciteta 160 gigabajta koja se sastoji od 700 memorijskih čipova, svaki kapaciteta 256 megabajta. Ovaj kapacitet i nije tako veliki s obzirom na količinu podataka koja se prikuplja; na primer, samo jedna slika HiRISE kamere može biti veličine 28 gigabajta.[27]
Određivanje položaja
[uredi | uredi izvor]Da bi se odredila orbita letelice i proračunali manevri, šesnaest solarnih senzora (osam primarnih i osam rezervnih) je smešteno na letelici da bi se odredio položaj Sunca u odnosu na orijentaciju letelice. Dve digitalne kamere koje se koriste za mapiranje pozicije poznatih zvezda, obezbeđuju Nasi potpune podatke u tri ose o poziciji letelice. Primarna i pomoćna Minijaturna unutrašnja jedinica za inercijalno merenje (engl. Miniature Inertial Measurement Unit - MIMU), koju je obezbedio Hanivel, meri promene orijentacije letelice kao i bilo kakve promene u brzini koje nisu uzrokovane gravitacijom. Svaka MIMU je kombinacija tri akcelerometra i tri žiroskopa. Svi ovi sistemi su kritično važni za MRO, jer omogućuju da se kamere upere sa veoma velikom preciznošću kako bi se obezbedile fotografije visoke rezolucije koje traži misija. Svi instrumenti su takođe posebno konstruisani tako da se minimiziraju vibracije letelice, koje bi uzrokovale da snimci budu zamućeni i neupotrebljivi.[28]
Telekomunikacioni sistem
[uredi | uredi izvor]
Telekomunikacioni podsistem MRO-a je najbolji digitalni komunikacioni sistem poslat u duboki svemir do danas i po prvi put je korišćen kapacitet koji je približan turbo kodu (najveća teoretska brzina prenosa podataka u nekom komunikacionom kanalu). Sastoji se od veoma velike antene (prečnika 3 m), koja se koristi za prenos podataka kroz Mrežu dubokog svemira pomoću X talasa frekvencije 8 GHz, i demonstrira korišćenje К talasnih dužina frekvencije 32 GHz za veći prenos podataka. Maksimalna projektovana brzina prenosa sa Marsa je 6 Mbit/s, što je deset puta više od prethodnih orbitera oko Marsa. Do kraja 2011. godine MRO je ka Zemlji poslao više od 150 terabajta podataka. Letelica sadrži dva pojačavača od 100 vati za X talase, jedan pojačavač od 35 vati za K talase, i dva transpondera za duboki svemir. Podsistem za К talase se koristi samo u demonstracione svrhe. Zbog nedostatka slobodnog spektra na 8,41 GHz X talasima, buduće misije u duboki svemir će koristiti К talase na 32 GHz. Mreža dubokog svemira svemirske agencije NASA je ugradila prijemnike za ove talasne dužine u sva tri svoja kompleksa (Goldstoun, Kanbera i Madrid) sa antenama prečnika 34m. Tokom faze krstarenja ka Marsu, letelica je 36 puta slala podatke preko nove frekvencije i sve je bilo u redu, tako da je njeno korišćenje omogućilo da služi kao rezerva ukoliko se nešto desi sa primarnim sistemom.[29]
Pogon i kontrola
[uredi | uredi izvor]
Letelica koristi rezervoar za gorivo kapaciteta 1.175 litara koji je napunjen sa 1.187 kg pogonskog goriva hidrazina. Pritisak goriva se reguliše dodavanjem helijuma pod pritiskom iz spoljašnjeg rezervoara. 70% goriva je potrošeno tokom ulaska u orbitu planete. MRO ima 20 ugrađenih raketnih potisnika. Šest većih potisnika zajedno proizvodi 1.020 N potiska za ulazak u primarnu orbitu oko Marsa. Ovi potisnici su prvobitno bili namenjeni za Mars Survejor lender 2001. godine. Šest srednjih potisnika proizvode 132 N potiska za promenu orbite i održavanje visine. Na kraju, osam malih potisnika proizvode ukupno 7,2 N potiska za orijentaciju letelice tokom prikupljanja naučnih podataka.
Četiri reakciona točka se koriste za preciznu kontrolu položaja letelice koja je potrebna tokom prikupljanja podataka, kao što je slikanje fotografija visoke rezolucije, gde se i najmanje kretanje može odraziti na kvalitet. Svaki točak se koristi za kretanje po jednoj osi. Četvrti (pričvršćeni) točak služi kao rezerva ukoliko jedan od prva tri zakaže. Svaki točak ima masu od 10 kg i može se okretati brzinom i do 6.000 obrtaja u minuti.[30]
Inženjeri Nase procenjuju da sonda ima dovoljno goriva da ostane u upotrebi najmanje do 2034. godine.[31]
Otkrića i fotografije
[uredi | uredi izvor]Izmerena količina leda u polarnim kapama
[uredi | uredi izvor]
Rezultati istraživanja radarom severne polarne kape objavljeni 2009. pokazuju da je zapremina leda 821.000 km³, što je 30% ledenog pokrivača na Grenlandu.[32]
Led izložen u novim kraterima
[uredi | uredi izvor]Članak u časopisu Nauka u septembru 2009. objavio je da su neki skoriji udarci meteorita stvorili nove kratere na Marsu i otkopali skoro čist led. Ove nove kratere je otkrila i datirala CTX kamera, a otkriće leda je potvrdio CRISM spektrometar. Led je pronađen na ukupno 5 lokacija.[33][34]
Led u geološkim odlikama
[uredi | uredi izvor]Rezultati skeniranja radarom SHARAD sugerišu da neke odlike terena nazvane LDE - Lobejt debri ejprons (engl. Lobate Debris Aprons - LDAs) sadrže velike količine leda. Interesantne još od dana Viking orbitera, ove geološke odlike podsećaju na kecelje materijala koje okružuju litice. Pored toga, ove odlike pokazuju površinski raspored linija poput lednika na Zemlji. SHARAD je obezbedio jake dokaze da su LDE u Helas oblasti u stvari lednici prekriveni tankim slojem krhotina (kamenja i prašine); jaka refleksija sa vrha i podnožja LDE sugeriše da led čini većinu ove geološke formacije.[35] Na osnovu eksperimenata Feniks lendera i podataka prikupljenih pomoću Mars odisej letelice iz orbite, zna se da led postoji odmah ispod površine tla na krajnjem severu i jugu planete.
Naslage hlorida
[uredi | uredi izvor]Pomoću podataka prikupljenim od strane Mars global survejor, Mars odisej i MRO letelica naučnici su otkrili rasprostranjene naslage minerala hlorida. Dokazi sugerišu da su ove naslage nastale isparavanjem vode bogate mineralima. Istraživanje ukazuje da su jezera možda bila raštrkana po celoj površini Marsa. Obično su hloridi poslednji minerali koji se rastvore. Karbonati, sulfati i silicijum-dioksid bi trebalo da se rastvore pre njih. Sulfati i silicijum-dioksid su pronađeni na površini planete od strane MER. Mesta sa hloridnim mineralima su možda nekada u prošlosti podržavala razne oblike života, što znači da takva mesta možda čuvaju tragove o životu u prošlosti.[36]
Drugi vodeni minerali
[uredi | uredi izvor]Grupa naučnika koja radi na instrumentu CRISM je 2009. godine objavila da se 9 od 10 klasa minerala formiralo u prisustvu vode. Različite vrste glina su pronađene na mnogim lokacijama. U ove gline se ubrajaju kaolinit, prehnit i hlorit. Stene koje sadrže karbonat su pronađene oko sliva Isidin. Karbonati pripadaju klasi u kojoj se možda razvio život. Oblasti oko Marinerovih dolina sadrže hidratisan silicijum-dioksid i hidratisane sulfate. Drugi minerali koji su nađeni na Marsu uključuju džerosit, alunit, hematit, opal i gips. Dve od pet mineralnih klasa su formirane sa odgovarajućim pH vrednostima i dovoljnom količinom vode za razvoj života.[37]
Lavine
[uredi | uredi izvor]CTX i HiRISE kamere uspele su da fotografišu određeni broj lavina blizu severne polarne kape u trenutku dok su se dešavale.[38]
Tekuća slana voda
[uredi | uredi izvor]NASA je objavila 4. avgusta 2011. godine da je detektovala nešto što podseća na tekuću slanu vodu na površini ili odmah ispod površine Marsa.[39] Nekoliko godina kasnije – 28. septembra 2015. godine, koristeći dodatne podatke prikupljene sondom MRO kao i ostalim letelicama koje se nalaze u orbiti i na površini Marsa, NASA je potvrdila da se u letnjim mesecima na površini pojavljuje tečna slana voda.[40][41][42][43]
40.000 orbita
[uredi | uredi izvor]Agencija NASA je u februaru 2015. godine objavila da je sonda Orbitalni istraživač Marsa dostigla 40.000 orbita oko crvene planete. Sonda je ovu prekretnicu dostigla 7. februara 2015. u devetoj godini istraživanja iz orbite. Do tog trenutka sonda je na Zemlju poslala 247 TB podataka, različitih merenja i fotografija visoke rezolucije, što je više od bilo koje misije koja je poslata u duboki svemir. Sonda se nalazi u polarnoj orbiti oko Marsa, na orbitalnoj visini od oko 300 km, iz koje nastavlja da prikuplja podatke o površini i atmosferi planete. Sonda služi i kao relejna stanica koja prima podatke sa rovera i lendera na površini planete i zatim ih prosleđuje ka Zemlji. Tokom svojih 40.000 orbita oko planete, sonda je prevalila skoro duplo veći put od onog koji je prešla u tranzitu između Zemlje i Marsa nakon lansiranja 2006. godine (oko 500.000.000 km).[44] Nekoliko dana ranije, 4. februara 2015. godine, NASA je objavila fotografiju na kojoj se vidi rover Kjuriositi na površini Marsa, blizu podnožja planine Šarp u Gejl krateru.[45][46]
Galerija
[uredi | uredi izvor]-
 Led oko kratera koji je nastao udarom između januara i septembra 2008. godine
Led oko kratera koji je nastao udarom između januara i septembra 2008. godine -
 Naslage hlorida.
Naslage hlorida. -
 Lavina na Marsu (HiRISE 2008. g.)
Lavina na Marsu (HiRISE 2008. g.) -
 Fotografija sa skalom koja ukazuje na veličinu lavine.
Fotografija sa skalom koja ukazuje na veličinu lavine.




- Druge sonde
-
 Sletanje sonde Feniks na Mars.
Sletanje sonde Feniks na Mars. -
 Sonda Feniks i njen toplotni štit.
Sonda Feniks i njen toplotni štit. -
 Tragovi rovera Oportjuniti. Bele tačke su mesta gde je zastao da vrši istraživanja ili se okretao.
Tragovi rovera Oportjuniti. Bele tačke su mesta gde je zastao da vrši istraživanja ili se okretao. -
 Oportjuniti 29. januara 2009. na putu ka krateru Endevor udaljenom 17 km.
Oportjuniti 29. januara 2009. na putu ka krateru Endevor udaljenom 17 km. -
 Sletanje rovera Kjuriositi snimljeno 6. avgusta 2012. U trenutku slikanja letelica je na udaljenosti od 340 km.
Sletanje rovera Kjuriositi snimljeno 6. avgusta 2012. U trenutku slikanja letelica je na udaljenosti od 340 km.





Vidi još
[uredi | uredi izvor]Reference
[uredi | uredi izvor]- ^ Webster, Guy (10. 8. 2015). „One Decade after Launch, Mars Orbiter Still Going Strong”. NASA. Pristupljeno 28. septembra 2015. Proverite vrednost paramet(a)ra za datum:
|access-date=(pomoć) - ^ „NASA - Communications With Earth Summary”. Arhivirano iz originala 18. 09. 2011. g. Pristupljeno 17. 2. 2012.
- ^ Greicius, Tony (9. 3. 2016). „Ten Years of Discovery by Mars Reconnaissance Orbiter”. Nasa. Arhivirano iz originala 12. 03. 2016. g. Pristupljeno 11. 3. 2016.
- ^ „Rover selected for Mars '03 mission”. Arhivirano iz originala 04. 02. 2012. g. Pristupljeno 17. 2. 2012.
- ^ „Spaceflight Now | Delta Launch Report | Lander targets Mars' water”. Pristupljeno 17. 2. 2012.
- ^ „Mars Exploration Program: 2005 - Mars Reconnaissance Orbiter”. Pristupljeno 17. 2. 2012.
- ^ „Mars Reconnaissance Orbiter: Press Releases”. Pristupljeno 17. 2. 2012.
- ^ „U.S. Spacecraft Enters Orbit Around Mars - New York Times”. Pristupljeno 17. 2. 2012.
- ^ „Spaceflight Now | Destination Mars | Mission Status Center”. Pristupljeno 17. 2. 2012.
- ^ „Mars Reconnaissance Orbiter: Press Releases”. Pristupljeno 17. 2. 2012.
- ^ „Google Earth Pomoć”. Pristupljeno 17. 2. 2012.
- ^ „HiRISE Instrument Parameters”. Pristupljeno 17. 2. 2012.
- ^ „HiRISE | High Resolution Imaging Science Experiment”. Pristupljeno 17. 2. 2012.
- ^ „Context Camera Investigation on board the Mars Reconnaissance Orbiter”. Pristupljeno 17. 2. 2012.
- ^ „Malin Space Science Systems - Mars Reconnaissance Orbiter (MRO) Context Camera (CTX)”. Pristupljeno 17. 2. 2012.
- ^ „Malin Space Science Systems - Mars Reconnaissance Orbiter (MRO) Mars Color Imager (MARCI)”. Pristupljeno 17. 2. 2012.
- ^ „MRO Mars Color Imager (MARCI) Description”. Arhivirano iz originala 05. 05. 2006. g. Pristupljeno 17. 2. 2012.
- ^ „CRISM Web Site”. Pristupljeno 17. 2. 2012.
- ^ „NASA - Mars Climate Sounder (MCS)”. Arhivirano iz originala 17. 9. 2011. g. Pristupljeno 17. 2. 2012.
- ^ „NASA - Shallow Subsurface Radar (SHARAD)”. Arhivirano iz originala 31. 12. 2011. g. Pristupljeno 17. 2. 2012.
- ^ „NASA - Gravity Field Investigation Package”. Arhivirano iz originala 16. 09. 2011. g. Pristupljeno 17. 2. 2012.
- ^ „NASA - Electra”. Arhivirano iz originala 13. 02. 2022. g. Pristupljeno 17. 2. 2012.
- ^ „Mars Reconnaissance Orbiter: Structures”. Pristupljeno 17. 2. 2012.
- ^ „Internet Archive Wayback Machine”. Arhivirano iz originala 31. 03. 2006. g. Pristupljeno 17. 2. 2012.
- ^ „Mars Reconnaissance Orbiter: Electrical Power”. Pristupljeno 17. 2. 2012.
- ^ „Mars Reconnaissance Orbiter: Command & Data-handling Systems”. Pristupljeno 17. 2. 2012.
- ^ „Mars Reconnaissance Orbiter: Telecommunications”. Arhivirano iz originala 27. 10. 2011. g. Pristupljeno 17. 2. 2012.
- ^ „Mars Reconnaissance Orbiter: Propulsion”. Pristupljeno 17. 2. 2012.
- ^ Gebhardt, Chris (25. 4. 2016). „NASA seeks to boost Mars communication network ahead of human missions”. Nasaspaceflight. Pristupljeno 25. 4. 2016.
- ^ „Radar Map of Buried Mars Layers Matches Climate Cycles | OnOrbit”. Arhivirano iz originala 21. 12. 2010. g. Pristupljeno 17. 2. 2012.
- ^ „Water Ice Exposed in Mars Craters | Space.com”. Pristupljeno 17. 2. 2012.}
- ^ „NASA - NASA TO HOLD TELECONFERENCE TO DISCUSS NEW FINDINGS ABOUT MARS”. Arhivirano iz originala 11. 10. 2011. g. Pristupljeno 17. 2. 2012.}
- ^ „www.planetary.brown.edu” (PDF). Arhivirano iz originala (PDF) 23. 01. 2021. g. Pristupljeno 17. 2. 2012.
- ^ Osterloo, M. et.al. 2008. Chloride-Bearing Materials in the Southern Highlands of Mars. Science. 319:1651–1654
- ^ Murchie, S. et al. 2009. A synthesis of Martian aqueous mineralogy after 1 Mars year of observations from the Mars Reconnaissance Orbiter. Journal of Geophysical Research: 114.
- ^ Russell, P. et al. (2008). Seasonally active frost-dust avalanches on a north polar scarp of Mars captured by HiRISE. Geophysical Research Letters 35, . doi:10.1029/2008GL035790. Nedostaje ili je prazan parametar
|title=(pomoć). - ^ „Salty water may be flowing on Mars | ScienceBlog.com”. Pristupljeno 17. 2. 2012.
- ^
- „NASA POTVRDILA: Potoci vode na Marsu (VIDEO)”. Večernje novosti. 28. 9. 2015. Pristupljeno 28. septembra 2015. Proverite vrednost paramet(a)ra za datum:
|access-date=(pomoć)
- „NASA POTVRDILA: Potoci vode na Marsu (VIDEO)”. Večernje novosti. 28. 9. 2015. Pristupljeno 28. septembra 2015. Proverite vrednost paramet(a)ra za datum:
- ^
- „NASA: Potoci vode na Marsu”. Politika. 28. 9. 2015. Pristupljeno 28. septembra 2015. Proverite vrednost paramet(a)ra za datum:
|access-date=(pomoć)
- „NASA: Potoci vode na Marsu”. Politika. 28. 9. 2015. Pristupljeno 28. septembra 2015. Proverite vrednost paramet(a)ra za datum:
- ^ Chang, Kenneth (28. 9. 2015). „NASA Says Signs of Liquid Water Flowing on Mars”. The New York Times. Pristupljeno 28. 9. 2015. „Christopher P. McKay, an astrobiologist at NASA’s Ames Research Center, does not think the R.S.L.s are a very promising place to look. For the water to be liquid, it must be so salty that nothing could live there, he said. “The short answer for habitability is it means nothing,” he said.”
- ^ Ojha, Lujendra; Wilhelm, Mary Beth; Murchie, Scott L.; McEwen, Alfred S. (28. 9. 2015). „Spectral evidence for hydrated salts in recurring slope lineae on Mars”. Nature Geoscience. doi:10.1038/ngeo2546. Pristupljeno 28. 9. 2015.
- ^ Webster, Guy (9. 2. 2015). „NASA Spacecraft Completes 40,000 Mars Orbits” (na jeziku: (jezik: engleski)). NASA. Arhivirano iz originala 10. 02. 2015. g. Pristupljeno 10. 2. 2015.
- ^ Webster, Guy (4. 2. 2015). „Mars Orbiter Spies Curiosity Rover at Work” (na jeziku: (jezik: engleski)). JPL. Arhivirano iz originala 10. 02. 2015. g. Pristupljeno 10. 2. 2015.
- ^ „Mars Reconnaissance Orbiter Captures Curiosity Rover” (na jeziku: (jezik: engleski)). Sci-News.com. 9. 2. 2015. Pristupljeno 10. 2. 2015.
Literatura
[uredi | uredi izvor]- Mishkin, Andrew (2004). Sojourner : An Insider's View of the Mars Pathfinder Mission. New York: Berkeley Books. ISBN 978-0-425-19199-6.
- Squyres, Steve (2005). Roving Mars: Spirit, Opportunity, and the Exploration of the Red Planet. New York: Hyperion. ISBN 978-1-4013-0149-1.
- Read, Peter L. & Lewis, Steven L. (2004). The Martian Climate Revisited: Atmosphere and Environment of a Desert Planet. Berlin: Springer. ISBN 978-3-540-40743-0.
- Zubrin, Robert (1997). The Case for Mars. London: Pocket Books. ISBN 978-0-684-83550-1.
Spoljašnje veze
[uredi | uredi izvor]- Zvanična strana misije
- Stranica Nase o misiji
- Nedeljni vremenski izveštaji sa Marsa
- Deset godina sonde MRO, Jutjub
Svemirske sonde upućene ka Marsu | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Aktivne |
|   | |||||||||
| Prošle |
| ||||||||||
| Neuspeh pri lansiranju | |||||||||||
| Planirane |
| ||||||||||
| Koncepti |
| ||||||||||
| Povezano | |||||||||||
| |||||||||||