
Rover



Rover (od engl. rover — „lutalica, nomad”), takođe zvan i planetarni rover (engl. planetary rover) ili planetohod (rus. планетоход), je vozilo koje se koristi za istraživanje svemira konstruisano za kretanje po površini planete ili nekog drugog nebeskog tela. Neki roveri bili su konstruisani za prevoz ljudi, dok su drugi bili delom ili u potpunosti autonomni roboti. Roveri se na površinu nekog nebeskog tela obično spuštaju uz pomoć lendera (letelice koja se spušta prema površini planete malom brzinom – mekano sletanje) ili neke slične svemirske letelice.[1]
Poređenje sa svemirskim letelicama drugog tipa[uredi | uredi izvor]

Roveri imaju nekoliko prednosti u odnosu na lendere, koji su stacionarni – mogu istražiti veću teritoriju i mogu se uputiti da istraže zanimljive površinske odlike koje im se nađu na putu. Ukoliko im se baterije napajaju solarnim panelima, mogu se pozicionirati tako da prikupe što više svetlosti u vreme zimskih meseci kada je Sunce nisko iznad horizonta. Roveri takođe pomažu u saznanjima o upravljanju robotima preko veoma velikih udaljenosti. Svaki rover mora biti makar delom autonoman jer radio-signali putuju brzinom svetlosti, pa im treba vremena da stignu od kontrolora sa Zemlje do rovera.
Prednost rovera u odnosu na orbitere (letelice koje istražuju neko nebesko telo iz orbite) je da on može da ispita površinu nebeskog tela sve do mikroskopskog nivoa i mogu vršiti fizičke eksperimente (instrumenti na roveru su u kontaktu sa površinom, pa je tako moguće detaljnije je ispitati na razne načine). S druge strane, roveri imaju manu u odnosu na orbitere jer je veća verovatnoća da dožive neuspeh, zbog sletanja i drugih rizika koji se javljaju, i mogu istražiti relativno malu površinu nebeskog tela oko samog mesta sletanja, dok orbiteri svojim instrumentima mogu „videti“ celu površinu iz orbite.
Odlike[uredi | uredi izvor]
Roveri do svog odredišta (površine nekog nebeskog tela) stižu svemirskom letelicom tipa lendera i moraju da rade u uslovima koji se značajno razlikuju od uslova koji vladaju na Zemlji, što zahteva da njihova konstrukcija bude robusna. Na primer, električni motori u točkovima rovera moraju da budu u stanju da podnesu snažne trzaje koje rover iskusi pri sletanju, zatim moraju biti dovoljno pouzdani da rade na temperaturama daleko ispod 0 °C, ali i da budu dugotrajni (elektromotori za rovere Spirit i Oportjuniti su tokom testiranja na Zemlji radili više godina bez prestanka).
Pouzdanost[uredi | uredi izvor]
Cela konstrukcija rovera mora biti ustanju da podnese velike promene ubrzanja (g-sile), visoke i niske temperature, pritisak, prašinu, koroziju, kosmičko zračenje, i da pored svega toga sistemi budu operativni makar tokom primarne misije.

Kompaktnost[uredi | uredi izvor]
Roveri se obično pakuju na letelicu koja će ih dostaviti na površinu planete ili nekog drugog nebeskog tela. Zato moraju biti rasklopivi, odnosno, moraju se što kompaktnije spakovati na lender a zatim se po sletanju moraju sami raspakovati (vidi sliku levo – točkovi rovera su savijeni kako bi zauzimao što manje prostora u fazi krstarenja). Roveri su takođe tokom faze krstarenja od Zemlje do mesta istraživanja povezani sa letelicom koja će ih tamo dostaviti radi napajanja, tako da ove veze moraju biti prekinute tokom ili nakon sletanja pre nego što rover krene u istraživanje.
Autonomija[uredi | uredi izvor]
Daljinska kontrola rovera u realnom vremenu moguća je samo u slučaju da su to lunarni roveri (lunohodi), jer je od nebeskih tela u Sunčevom sistemu jedino Mesec dovoljno blizu da komande poslate radio vezom do njega stignu skoro istog trenutka. Razlog je brzina radio-signala, koji se kreću brzinom svetlosti. Mesec je od Zemlje u proseku udaljen 384.399 km, dok brzina svetlosti iznosi 299.792,458 km/s, tako da signalu sa Zemlje treba samo oko 1,282 sekunde da stigne do rovera. S druge strane, ukoliko se rover nalazi na Marsu (marsohod), brzina signala je ista, ali je udaljenost daleko veća, pa signalu treba između 3 i 21 minuta da sa Zemlje stigne do rovera, i još toliko da se vrati nazad kako bi kontrola misije dobila povratnu informaciju. Stoga, stepen autonomije rovera (osim u slučaju lunohoda) mora biti visok. Na primer, roveri koji slete na Mars su većinom autonomni, u svojim kompjuterima imaju komande koje im omogućuju naučna istraživanja, kretanje i prikupljanje uzoraka, mada je i dalje neophodno da im se sa Zemlje pošalju komande koje će ih uputiti ka nekoj „meti“ za analizu.[2] Ovi roveri su najčešće opremljeni softverom koji analizira prikupljene fotografije i na osnovu njih može sam da izabere najbolju putanju kojom će stići do destinacije koja mu je zadata, izbegavajući usput veliko kamenje ili dubok pesak, čime se značajno ubrzava njegovo kretanje po površini i omogućava obilazak većeg broja lokacija za manje vremena.[2]

Konstrukcija[uredi | uredi izvor]
Izvor napajanja[uredi | uredi izvor]


Svim roverima izvor napajanja su baterije, koje obezbeđuju električnu energiju za elektromotore u točkovima, za snimanje fotografija i za rad naučnih instrumenata i za održavanje vitalnih komponenti rovera (poput računara i nekih instrumenata) zagrejanim, odnosno na nekoj temperaturi koju komponente mogu tolerisati a da se ne pokvare. Kapacitet baterije varira u zavisnosti od veličine rovera i toga koliko energije je potrebno za napajanje svih sistema. Prvi roveri imali su veće baterije jer instrumenti nisu bili energetski efikasni (trošili su mnogo energije), a sa razvojem energetske elektronike i drugih tehnologija baterije su ili postajale manje ili je veći broj instrumenata mogao da radi sa istim kapacitetom (na primer, rover Kjuriositi ima ukupno 11 instrumenata koji se napajaju sa samo 125 W, što je malo više od obične sijalice).
Razlike postoje i kod metode kojom se baterije pune. Do sada su primenjivane tri metode. Prva, korišćena kod sovjetskih rovera Lunohod 1 i 2 i kod kineskog rovera Jutu, podrazumeva punjenje baterije preko solarnih panela tokom vremena koje rover provodi na osunčanoj strani Meseca, i tada baterije obezbeđuju napajanje za sve sisteme. Tokom lunarne noći (koja traje 14 dana) baterije rovera sa ne dopunjuju, a izvor napajanja tada je radioizotopna jedinica za grejanje (korišćeno gorivo bio je plutonijum-210) koja održava temperaturu unutar rovera, ali ne i napajanje za ostale sisteme. Kada se Sunce ponovo pojavi iza horizonta, baterije počinju da se pune preko panela i ponovo preuzimaju napajanje svih sistema. Druga, korišćena kod američkih marsovskih rovera Sodžurner, Spirit i Oportjuniti, podrazumeva napajanje baterija samo putem solarnih panela, bez radioaktivnog izvora za grejanje sistema tokom noći. Ovo je bilo moguće jer su dan i noć na Marsu približnog trajanja kao i na Zemlji, dok je na Mesecu noć daleko duža, pa baterije ne bi bile dovoljne.

Prednost ovakvog sistema je što nema upotrebe radioaktivnog materijala, pa je priprema rovera manje složena. Inženjeri su mislili da će solarni paneli raditi u punoj efikasnosti (proizvoditi maksimum energije) samo tokom prvih nekoliko sedmica misije, a da će zatim biti prekriveni prašinom i da će do kraja misije proizvoditi samo trećinu početne energije. Međutim, ispostavilo se da se na panelima ne sakuplja tako velika količina prašine. Uz to, povremeno se dogodi, pukom srećom, da naleti vetra oduvaju prašinu sa površine panela, tako da oni ponovo proizvode skoro maksimalnu količinu energije. Ovo se dogodilo više puta sa roverima za istraživanje Marsa, tako da rover Oportjuniti nastavlja da istražuje crvenu planetu i deset godina nakon završetka primarne misije. Ovim je pokazano da se solarni paneli mogu koristiti i na ostalim misijama, a ne samo na orbiterima. Treća metoda za sada je korišćena samo jednom, na roveru Kjuriositi agencije NASA. Podrazumeva napajanje rovera isključivo putem radioaktivnog izvora.[3][4] U rover je ugrađen najmoderniji multimisioni radioizotopni termoelektrični generator (MMRTG), koji je razvila kompanija Boing.[5] Ovakav sistem napajanja omogućava roveru da operiše i danju i noću, bez zavisnosti od Sunca. Takođe, životni vek ovog izvora je najmanje 14 godina, kada će njegova snaga opasti sa početnih 125 na 100 W, ali će rover moći i dalje da koristi većinu instrumenata, ili sve naizmenično, pod uslovom da oni do tada ne otkažu.[6] Ovaj izvor napajanja dobro se pokazao, tako da NASA planira da ga upotrebi i kod naredne misije zakazane za 2020. godinu.
„Telo“ rovera[uredi | uredi izvor]
Takozvano „telo“ rovera je centralni deo u kojem se nalaze svi vitalni sistemi i ponekad naučni instrumenti. „Telo“ je po pravilu kvadar, na koji su nakačeni točkovi, solarni paneli (ukoliko se rover njima napaja), instrumenti, kamere, robotska ruka i drugo. Ovaj deo rovera ima ugrađene grejače koji u unutrašnjosti održavaju temperaturu jer su neke komponente osetljive na niske temperature (na primer, na Marsu se temperatura noću spusti i ispod -100 °C). Najvažnija komponenta koje se nalazi u telu je računarska jedinica, koja se obično sastoji iz dva računara (glavnog i pomoćnog, koji preuzima dužnost u slučaju otkaza glavnog, a istih su karakteristika) i memorijskog modula. Zavisno od vešanja koje je ugrađeno, telo rovera se nalazi bliže ili dalje od površine nebeskog tela po kojem se kreće. Ovo je važno jer se u prvom slučaju mora paziti kuda se rover kreće, da se ne bi dogodilo da neki kamen zakači donji deo „tela“ i ošteti ga, a može se desiti i da se rover tako zaglavi, i u tom slučaju misiji bi bio kraj.
Točkovi[uredi | uredi izvor]
Točkovi rovera su različite konstrukcije i oblika, zavisno od destinacije na koju se šalje i od karakteristika površine tog nebeskog tela. Sovjetski Lunohodi su imali osam točkova, lunarno vozilo koje je korišćeno tokom ljudskih misija na Mesec projekta Apolo imalo je četiri, dok su svi marsovski roveri i lunarni rover Jutu imali šest točkova. Konstrukcija točkova uglavnom je slična, odnosno, prave se tako da obezbede najbolje naleganje na površinu uz najmanju masu. Zanimljivo je da su inženjeri kod rovera Kjuriositi u točkove ugradili niz rupica koje Morzeovom azbukom u površini Marsa ispisuju JPL – skraćenica Laboratorije za mlazni pogon.[7] Ovo je veoma praktično rešenje za utvrđivanje distance koju je rover prešao i upoređivanja sa podacima koji se dobiju od elektromotora na točkovima, tako da inženjeri mogu da utvrde da li su i koliko točkovi proklizavali.
-
 Provera ispravnosti točka rovera Kjuriositi
Provera ispravnosti točka rovera Kjuriositi -
 Poređenje veličina točkova marsovskih rovera
Poređenje veličina točkova marsovskih rovera -
 Točak lunarnog vozila
Točak lunarnog vozila -
 Točkovi sovjetskih Lunohoda
Točkovi sovjetskih Lunohoda
.gif)



Kamere[uredi | uredi izvor]

Prvi roveri posedovali su TV kamere niske rezolucije i u crno-beloj tehnici. Ove kamere obično su bile postavljene na telo rovera, tako da su se nalazile nisko i nisu mogle da se rotiraju. Lunohodi su posedovali tri kamere. Prvi marsovski rover, Sodžurner, takođe je posedovao tri kamere. Dve su bile postavljene na prednju stranu rovera i bile su crno-bele, dok je jedna bila postavljena pozadi i bila je u boji. Roveri Spirit i Oportjuniti opremljeni su sa devet kamera – četiri su bile montirane na stubu koji se uzdizao 1,5 metara od površine i služile su za panoramsko razgledanje okoline. Stub može da se rotira 360°. Druge četiri kamere montirane su na telo rovera, dve napred i dve pozadi, i služe za osmatranje terena i izbegavanje prepreka. Poslednja kamera nalazi se na robotskoj ruci rovera, i služi za fotografisanje stena iz velike blizine, kako bi naučnici mogli što bolje da vide njihovu strukturu. Poslednji rover koji je sleteo na Mars, Kjuriositi, poseduje čak 17 kamera: 8 kamera za izbegavanje prepreka montiranih po četiri na prednju i zadnju stranu rovera, 4 navigacione kamere montirane na stub koje služe za fotografisanje putanje kojom se rover kreće i određivanje najbezbednijeg puta, dve kamere visoke rezolucije koje služe za fotografisanje udaljenih objekata, jedna kamera nalazi se na robotskoj ruci i naučnicima služi kao mikroskop, i poslednja kamera je u stvari veoma moćan laser koji ispaljuje pulseve energije usled kojih stena isparava a zatim kamera tu paru analizira i tako se utvrđuje sastav stene.[8][9][10][11][12][13][14][15][16][17][18][19][20][21][22][23]
Kineski rover Jutu poseduje slične kamere kao roveri Spirit i Oportjuniti, ali uz to može da vrši prenos uživo jer je Mesec dovoljno blizu da je ova mogućnost dostupna. Video silaska rovera sa lendera dostupan je na sajtu Jutjub i može se videti ovde.
„Ruka“ rovera[uredi | uredi izvor]


Upotreba robotske ruke na roverima počela je sa roverima za istraživanje Marsa agencije NASA. Naučnici su imali ideju da makar jedan, a ako je moguće i nekoliko naučnih instrumenata postave na neku vrstu robotske ruke kojom bi ti instrumenti mogli da budu prineseni do same površine planete kako bi izvršili analizu. Inženjeri su tu ideju sproveli u delo i konstruisali robotsku ruku koja ima tri zgloba, i na koju su mogli da se postave instrumenti. Sami instrumenti su namenski konstruisani kako bi bili što kompaktniji i sa što manjom masom, jer je robotska ruka imala ograničenje u masi koju može da prenese. Isto tako, smanjivanje gabarita instrumenata značilo je da se na ruku može postaviti više njih umesto jednog. Zvaničan naziv bio je uređaj za premeštanje instrumenata (engl. instrument deployment device), ali inženjeri i svi ostali članovi tima najčešće koriste termin „robotska ruka“ ili samo „ruka“ rovera. Na ruci rovera za istraživanje Marsa montirani su sledeći instrumenti: Mesbauerov spektrometar,[24][25] spektrometar alfa-čestica X-zraka[26], magneti za prikupljanje čestica prašine, mikroskopska kamera i alat za skidanje površinskog sloja prašine sa stena.

Rover Kjuriositi je sledeći koji je bio opremljen robotskom rukom. Ovaj rover je većih gabarita od prethodnih rovera, tako da su inženjeri na njega mogli da ugrade veću robotsku ruku, pa samim tim i bolje naučne instrumente. Ruka ovog rovera duga je 2,1 m, a na njenom kraju nalazi se kupola spljoštenog oblika po čijem obimu su postavljeni instrumenti, i ova kupola se može rotirati 350° kako bi svaki instrument mogao da se postavi u optimalnu poziciju za analizu. Ruka ima tri zgloba kako bi što bolje mogla da pozicionira instrumente do meta za analizu daleko od rovera. Kada naučnici žele da ispitaju neki deo terena, rover se zaustavlja i otvara (ispruži) ruku; nakon toga, kada se sve analize završe, ruka rovera se sklapa u početni položaj i rover kreće ka sledećoj destinaciji (ruka rovera je uvek u sklopljenom položaju kada je rover „u putu“, odnosno kada prelazi veliku udaljenost od više desetina ili stotina metara, ali kada se zaustavi da ispita neku metu ruka se rasklapa i tada se rover može kretati ali znatno sporije). Ruka zajedno sa instrumentima ima masu 30 kg, i maksimalni prečnik kupole sa instrumentima je 60 cm.
Dva od pet instrumenata na ruci ispitivanja vrše in-situ (veoma blizu svoje mete), i to su spektrometar alfa-čestica X-zraka i MAHLI kamera. Ostala tri su vezana za prikupljanje i pripremu uzoraka – bušilica, abrazivna četkica i uređaj za prikupljanje, mrvljenje i dostavljanje uzoraka u instrumente koji se nalaze u telu rovera kroz otvor na gornjem delu „tela“. Prečnik rupe nakon bušenja je 1,6 cm i maksimalna dubina može biti do 5 cm. Bušilica poseduje dve rezervne glave (burgije).[27][28][29][30][31]
Istorija[uredi | uredi izvor]

Lunohod 1A[uredi | uredi izvor]
Sovjetski robotizovani rover trebalo je da postane prvi robot na površini Meseca koji će biti daljinski kontrolisan, ali se dogodila nesreća pri lansiranju rakete-nosača 19. februara 1969. godine.
Lunohod 1[uredi | uredi izvor]
Rover Lunohod 1 prizemljio se na površinu Meseca u novembru 1970. godine.[32] Time je postao prvi daljinski kontrolisan robot koji je sleteo na neko nebesko telo. Sovjetski Savez lansirao je Lunohod 1 zajedno sa lenderom Luna 17 10. novembra 1970. godine. Ova letelica je zatim ušla u orbitu oko Meseca 15. novembra, a zatim se spustila na površinu 17. novembra na lokaciju More kiše (lat. Mare Imbrium). Lender je posedovao dve rampe kojima je rover mogao da siđe sa lendera na površinu, što se i dogodilo na dan sletanja u 06.28 UTC. Od 17. do 22. novembra Lunohod 1 je prešao 197 metara, i tokom deset sesija komunikacije sa Zemljom poslao 14 fotografija površine iz blizine i 12 panoramskih fotografija. Takođe je analizirao Mesečevo tlo. Poslednja komunikaciona sesija sa roverom dogodila se 14. septembra 1971. godine. Nakon 11 meseci istraživanja[33] Lunohod 1 je postavio rekord po trajanju misije jednog rovera koji je oboren tek 30 godina kasnije od strane rovera Spirit i Oportjuniti.
Lunarno vozilo projekta Apolo[uredi | uredi izvor]

Agencija NASA upotrebila je lunarno vozilo u tri misije projekta Apolo – Apolo 15 (sleteo na površinu 30. jula 1971), Apolo 16 (sleteo na površinu 21. aprila 1972) i Apolo 17 (sleteo na površinu 11. decembra 1972. godine).[34] Vozilo je bilo napajano baterijama i imalo četiri točka (slika desno). Često su ga nazivali i „Mesečev bagi“, jer je bilo slično vozilu za rekreaciju koje ima naziv „bagi“ (engl. Dune buggy). Lunarno vozilo je do površine Meseca bilo spakovano na Lunarni modul, a po sletanju bi ga astronauti rasklopili. Vozilo je moglo da preveze dva astronauta, njihovu opremu i uzorke koje sakupe. Tri lunarna vozila koja su korišćena tokom projekta Apolo ostala su na površini Meseca, gde se i danas nalaze.
Lunohod 2[uredi | uredi izvor]

Lunohod 2 je drugi lunarni rover koji je na površinu Meseca sleteo u okviru sovjetskog programa Lunohod. Rover je započeo istraživanje površine 16. januara 1973. godine.[35] Time je postao tek drugo robotizovano vozilo koje je uspešno sletelo na neko nebesko telo, nakon Lunohoda 1. Sovjetski Savez lansirao je Lunohod 2 u sklopu misije Luna 21, 8. janaura 1973. godine, i ova letelica je u orbitu oko Meseca uspešno ušla 12. janaura iste godine. Nakon toga, letelica se 15. januara lagano spustila na lokaciju blizu istočne granice Mora vedrine (lat. Mare Serenitatis). Lunohod 2 se spustio niz dve rampe sa letelice Luna 21 u 01.14 UTC 16. januara. Rover je na površini bio aktivan naredna četiri meseca, i za to vreme je prešao oko 39 km preko raznih vrsta terena, uključujući i visije, brdašca i manje pukotine, i snimio 86 panoramskih fotografija i preko 80.000 TV slika.[36][37][38] Na osnovu broja obrtaja točkova prvo se smatralo da je rover prevalio 37 km, ali su ruski naučnici sa Moskovskog državnog univerziteta za geodeziju i kartografiju (rus. Московский государственный университет геодезии и картографии, MIIGAiK) tu brojku uvećali na 42,1–42,2 km na osnovu fotografija površine koje je prikupio Lunar rekonesans orbiter agencije NASA.[39][40] Nakon toga, isti naučnici su prodiskutovali na ovu temu sa svojim američkim kolegama i saglasili se da je rover najverovatnije prevalio 39 km, i ova brojka se od tada uzima kao zvanični podatak.[41][42]
Prop-M rover[uredi | uredi izvor]
Sovjetski lenderi Mars-2 i Mars-3 sa sobom su nosili male rovere mase 4,5 kg, koji bi se po površini kretali na skijama i bili povezani sa lenderom putem kabla dužine 15 metara. Dve male metalne šipke služile bi za izbegavanje prepreka, jer bi radio-signalima trebalo mnogo vremena da stignu do rovera i da se njim tako upravlja. Rover bi po sletanju bio dostavljen na površinu robotskom rukom lendera, i kretao bi se u vidokrugu televizijskih kamera, zastajući na svakih 1,5 m kako bi izvršio merenja. Tragovi koji bi ostajali iza njega bili bi fotografisani kako bi se utvrdio sastav tla. Pošto je izgubljen kontakt sa obe misije, nijedan od ovih rovera nije dospeo na površinu Marsa.
Lunohod 3[uredi | uredi izvor]
Sovjetski Savez je planirao da pošalje treći rover na površinu Meseca 1977. godine. Misija je otkazana jer nije mogla da dobije mesto na nekoj raketi-nosaču i zato što nije bilo dovoljno novčanih sredstava, iako je sam rover u potpunosti konstruisan.
Marsohod[uredi | uredi izvor]
Marsohod je bio sovjetski rover teške klase koji je trebalo da istražuje površinu Marsa, deo misije Mars 4NM koja je ka crvenoj planeti trebalo da bude lansirana raketom-nosačem N-1 posle 1973. godine (po planovima iz 1970. godine). Međutim, kako ova raketa u svoja 4 lansiranja nije imala nijedno uspešno, misija je otkazana.
Sodžurner[uredi | uredi izvor]

Deo misije Mars patfajnder bio je i mali rover nazvan Sodžurner (engl. Sojourner), prvi rover koji je uspešno sleteo na drugu planetu. Lender Patfajnder lasnirala je američka agencija NASA 4. decembra 1996. godine, i nakon više meseci krstarenja u međuplanetarnom prostoru, uspešno se spustio na površinu Marsa 4. jula 1997. godine.[43] Od svog sletanja do kraja misije Patfajnder je na Zemlju poslao preko 16.500 fotografija sa lendera i 550 fotografija koje je snimio Sodžurner. Uz to, odrađeno je i 15 analiza stena i tla, a prikupljeno je i obilje podataka o vetru i drugim atmosferskim uslovima na Marsu.[43]
Bazna stanica misije Patfajnder poslednji put poslala je signal ka Zemlji 27. septembra 1997. godine. Rover je sa Zemljom komunicirao preko bazne stanice, tako da je i veza sa njim izgubljena, mada je on radio bez ikakvih problema u tom trenutku. Sodžurner je tokom svog boravka na Marsu prešao malo preko 100 metara do trenutka kada je izgubljen signal.[44] Poslednja komanda koja mu je upućena bila je da ostane u mestu do 5. oktobra 1997. godine (sol 91), a zatim da ode sa druge strane lendera.[45]
Bigl 2[uredi | uredi izvor]
Bigl 2 bila je sonda agencije ESA koja je ka Marsu upućena zajedno sa orbiterom Mars ekspres 2. juna 2003. godine. Sonda je u suštini bila lender, ali je posedovala malu „krticu“ (PLanetary Undersurface TOol – PLUTO, ili u prevodu planetarni potpovršinski alat) koja bi bila oslobođena uz pomoć robotske ruke. PLUTO je bio opremljen složenim sistemom opruga koji mu je omogućavao da se kreće po površini planete brzinom od 20 mm/s (1,2 m/h), a njegov glavni zadatak bio je da se zarije u tlo i sakupi uzorak za analizu. Kontakt sa lenderom Bigl 2 izgubljen je nakon odvajanja od orbitera.

Spirit[uredi | uredi izvor]
Spirit je bio marsovski rover, operativan između 2004. i 2010. godine.[46] Bio je jedan od dva rovera koji su razvijeni u sklopu misije Roveri za istraživanje Marsa agencije NASA. Na površinu Marsa sleteo je 4. januara 2004. godine u 04.35 UTC, tri sedmice pre svog brata blizanca, rovera Oportjuniti, koji je sleteo na drugu stranu planete. Roveri su bili konstruisani za misiju u trajanju od 90 sola, a Spirit je nastavio da istražuje crvenu planetu čitavih 1.832 sola (sol je dan na Marsu, iznosi 24 sata 39 minuta i 35,244 sekunde). Krajem 2009. godine Spirit se zaglavio u pesku i poslednji put se javio kontroli misije 22. marta 2010. godine.
Aktivne misije[uredi | uredi izvor]
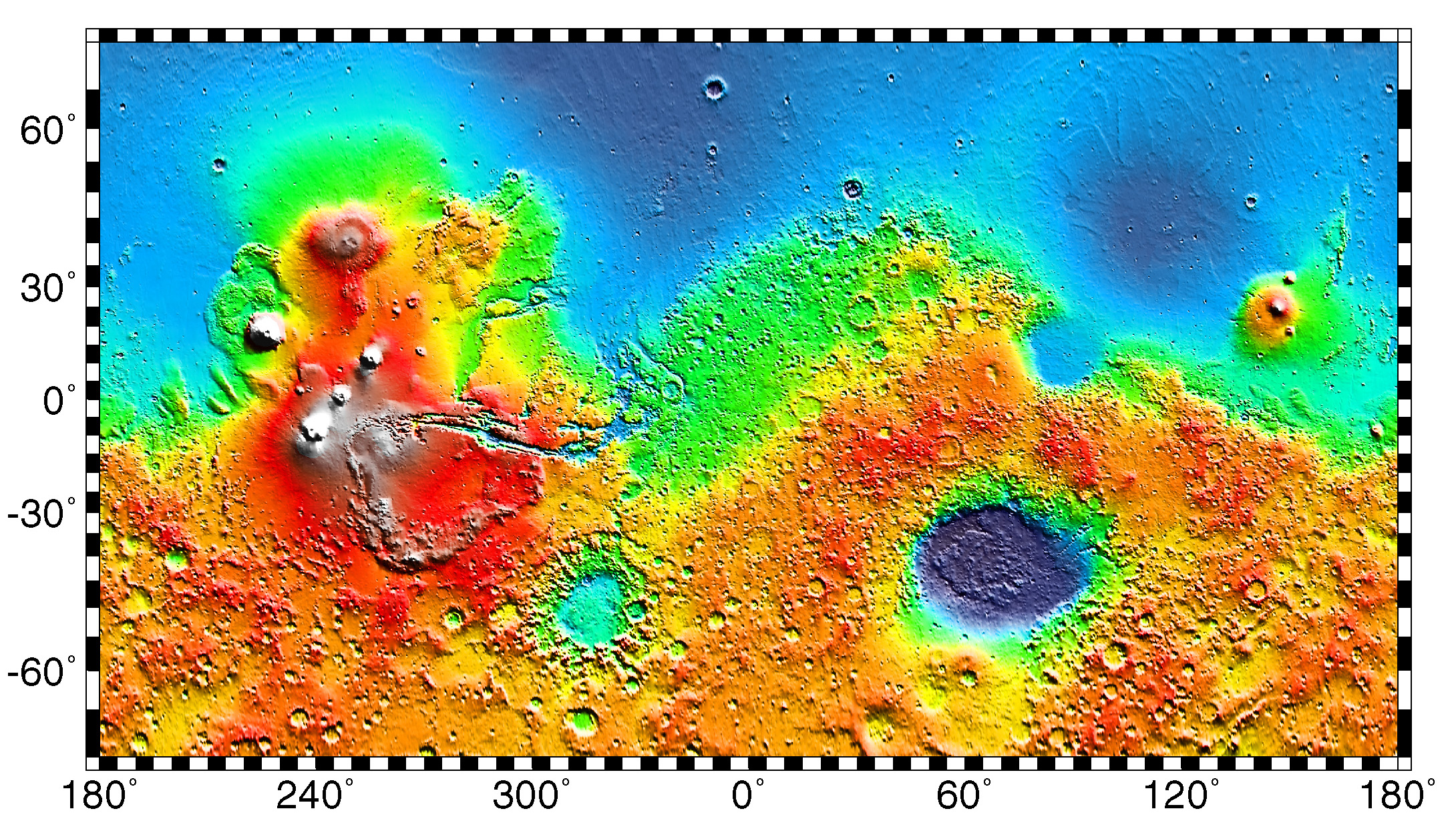
Mapa sa mestima sletanja[uredi | uredi izvor]
Na sledećoj mapi planete Mars ugrađene su hiperveze ka neki značajnijim geografskim odlikama pored mesta na kojima su sleteli lenderi i roveri. Samo kliknite na vezu i otvoriće vam se članak na tu temu (napomena: trenutno je napisan samo članak o planini Olimp). Sever je u gornjem delu. Visina terena – crvena (viša), žuta (nula) i plava (niža).

Oportjuniti[uredi | uredi izvor]
Oportjuniti je robotizovani rover koji istražuje planetu Mars od januara 2004. godine. Deo je misije Roveri za istraživanje Marsa agencije NASA. Sa Zemlje je lansiran raketom Delta II 7. jula 2003. godine. Na Mars je sleteo 25. januara 2004. godine u 05.05 UTC po Zemaljskom vremenu (oko 13.15 po lokalnom vremenu na Marsu), tri sedmice nakon svog brata blizanca, rovera Spirit, koji je sleteo na drugu stranu planete. NASA je 28. jula 2014. godine objavila da je rover Oportjuniti oborio rekord po distanci koju je jedan rover prevalio na nekom nebeskom telu, sa pređenih više od 40 km. Prethodni rekord od 39 km (po površini Meseca) držao je sovjetski Lunohod 2 duže od 30 godina.[47][48] (slika sa podacima)
Kjuriositi[uredi | uredi izvor]
Dana 26. novembra 2011. uspešno je lansiran rover Kjuriositi agencije NASA, raketom Atlas V. U avgustu 2012. godine, nakon više meseci putovanja kroz međuplanetarni prostor, rover se uspešno spustio na površinu planete, u Gejl krater, sa do tada neviđenom preciznošću.[49][50]
.jpg)
Kjuriositi je evolucija prethodnih uspešnih rovera – Spirit i Oportjuniti. Veći je i masivniji, i sadrži veći broj naučnih instrumenata. Napajanje je takođe drugačije, jer za razliku od prethodnih rovera koji su koristili solarne panele za punjenje baterija, Kjuriositi ima multimisioni radioizotopni termoelektrični generator. Rover je pronašao dokaze da je na ovoj lokaciji nekada bilo vode u tečnom stanju, da je u blizini tekla reka i ulivala se u veliko jezero. Kasnije je rover pronašao tragove metana na površini[51][52], a ubrzo zatim su detektovana i organska jedinjenja.[51][52]
Čange 3[uredi | uredi izvor]
Čange 3 je kineska istraživačka misija na Mesecu, u sklopu koje su lender i rover nazvan Jutu (kin: 玉兔). Pre ove misije Kina je lansirala dva orbitera, Čange 1 i Čange 2, koji su iz orbite fotografisali površinu u potrazi za pogodnim mestom za sletanje lendera i rovera. Nakon što su te misije uspešno okončane, lansirana je misija Čange 3, 1. decembra 2013. godine raketom-nosačem Dugi marš 3B. Letelica je u orbitu oko Meseca ušla 6. decembra[53], a nakon toga sletela na površinu 14. decembra[54], i tako postala prva sonda koja se prizemljila malom brzinom na Mesec posle sovjetske Lune 24 1976. godine.[55] Odmah po sletanju lender je rasklopio dve rampe po kojima je rover Jutu sišao na površinu u 20.35 UTC. Rover se uspešno udaljio od lendera, okrenuo se i „pogledao“ ka njemu, a ceo događaj bio je uživo prenošen na nacionalnoj televiziji. Ubrzo su aktivirani instrumenti i rover je započeo ispitivanja tla. Nakon prve lunarne noći, koja traje 14 dana, otkazali su točkovi rovera, tako da je ostao nepokretan, ali je nastavio da prikuplja podatke preko svojih naučnih instrumenata.[56] Cela misija deo je druge faze Kineskog programa za istraživanje Meseca, u okviru kojeg će biti lansirane misije Čange 4 i Čange 5. Prva je identična misiji Čange 3 (lender i rover), dok će druga misija sleteti na Mesec 2017. godine, sakupiti i vratiti uzorke tla na Zemlju (oko 2 kg uzoraka).[57][58][59]
Planirani roveri[uredi | uredi izvor]
Čandrajan 2[uredi | uredi izvor]
Čandrajan 2 (na sanskritu: चन्द्रयान-२) je druga po redu istraživačka misija koju će ka Mesecu uputiti Indija. Misiju čine orbiter, lender i rover. Planirano je da misija bude lansirana krajem 2016. ili početkom 2017. godine.[60][61] Indijska organizacija za istraživanje svemira, koja je odgovorna za konstrukciju, lansiranje i operaciju misije, izjavila je da će misija Čandrajan 2 biti platforma za testiranje novih tehnologija i upotrebiće neke eksperimente koji su skoro razvijeni.[62][63][64]

Lunarni rover (lunohod) biće u stanju da podigne stene i analizira njihov sastav. Sakupljeni podaci biće poslati na Zemlju preko orbitera misije Čandrajan 2.[65]
Egzomars rover[uredi | uredi izvor]
Evropska svemirska agencija trenutno radi na izgradnji rovera koji će sleteti na Mars. Rover je deo zajedničke misije sa ruskom FKA. Gabaritima će biti između rovera za istraživanje Marsa i rovera Kjuriositi. Biće napajan solarnim panelima i velikim brojem naučnih instrumenata, među kojima je i bušilica kojom će izvaditi uzorak tla sa dubine od 2 metra. Lansiranje je planirano za 2018. godinu raketom-nosačem Proton,[66] ali je odloženo za 2020. zbog manjka sredstava i sporih administrativnih odluka na obe strane.
Marsovski rover 2020[uredi | uredi izvor]
Marsovski rover 2020. je radni naziv misije agencije NASA planirane za lansiranje 2020. godine.[67] Zvaničan naziv misije obično se izabere par godina pred lansiranje putem javnog glasanja u kojem učestvuju učenici osnovnih i srednjih škola iz SAD. Planirano je da sprovede istraživanja vezana za astrobiološka okruženja koja su postojala na Marsu, ispita geološke procese na površini i geološku istoriju, kao i da traga za dokazima da su biološki tragovi mogli da opstanu do danas u stenama Marsa.[68][69] Agencija NASA je objavila da započinje rad na ovoj misiji 4. decembra 2012. na sastanku Američke geofizike unije u San Francisku.[70] Konstrukcija rovera biće skoro ista kao rover Kjuriositi, ali će sadržati drugačije naučne eksperimente.[71] Skoro 60 timova[72][73] se prijavilo sa idejama za instrumente, i NASA je, 31. jula 2014. godine, objavila konačan spisak instrumenata koji će biti ugrađeni.[74][75] Među sedam instrumenata je i jedan kojim će naučnici pokušati da izoliraju kiseonik iz atmosfere Marsa.[68][69]
Vidi još[uredi | uredi izvor]
Reference[uredi | uredi izvor]
- ^ „Exploring The Planets - Tools of Exploration - Rovers”. Air and Space Museum. 2002. Arhivirano iz originala 25. 07. 2009. g. Pristupljeno 3. 1. 2013.
- ^ a b Schirber, Michael (8. 7. 2012). „Rovers of the future may make decisions on their own”. Astrobiology Magazine. Mother Nature Network. Pristupljeno 10. 7. 2012.
- ^ Caponiti, Alice (januar 2008). „Multi-Mission Radioisotope Thermoelectric Generator” (PDF) (na jeziku: (jezik: engleski)). Arhivirano iz originala (PDF) 17. 8. 2012. g. Pristupljeno 14. 2. 2012. „Multimisioni radioizotopni termoelektrični generator”
- ^ Brown, Dwayne. „Radioisotope Power and Heating for Mars Surface Exploration” (PDF) (na jeziku: (jezik: engleski)). NASA. Arhivirano iz originala (pdf) 12. 10. 2012. g. Pristupljeno 14. 2. 2012. „Napajanje i grejanje radioizotopima za istraživanje Marsa”
- ^ „Mars Science Laboratory will use a radioisotope power system” (na jeziku: (jezik: engleski)). JPL. Pristupljeno 14. 2. 2012. „MNL će koristiti nuklearni sistem napajanja”
- ^ „Mars Science Laboratory will use a radioisotope power system” (na jeziku: (jezik: engleski)). Pristupljeno 14. 2. 2012.
- ^ „New Mars Rover to Feature Morse Code” (na jeziku: (jezik: engleski)). ARRL. 23. 3. 2011. Pristupljeno 14. 2. 2012. „Morzeova azbuka na roveru”
- ^ Malin, Michael C. „Mast Camera (Mastcam)” (na jeziku: (jezik: engleski)). JPL. Arhivirano iz originala 08. 08. 2012. g. Pristupljeno 23. 2. 2012. „Stubna kamera”
- ^ Edgett, Kenneth S. „Mars Hand Lens Imager (MAHLI)” (na jeziku: (jezik: engleski)). Arhivirano iz originala 15. 08. 2012. g. Pristupljeno 23. 2. 2012. „Kamera robotske ruke”
- ^ Malin, Michael C. „Mars Descent Imager (MARDI)” (na jeziku: (jezik: engleski)). Arhivirano iz originala 07. 08. 2012. g. Pristupljeno 23. 2. 2012. „Kamera za slikanje pri sletanju”
- ^ „Mastcam Instrument Description” (na jeziku: (jezik: engleski)). Malin Space Science Systems. Pristupljeno 23. 2. 2012. „Opis instrumenta MastCam”
- ^ Stern, Alan & Green, Jim (8. 11. 2007). „Mars Science Laboratory Instrumentation Announcement from Alan Stern and Jim Green, NASA Headquarters” (na jeziku: (jezik: engleski)). marstoday.com. Arhivirano iz originala 17. 8. 2012. g. Pristupljeno 23. 2. 2012.
- ^ „Mars Hand Lens Imager (MAHLI)” (na jeziku: (jezik: engleski)). Arhivirano iz originala 15. 08. 2012. g. Pristupljeno 23. 2. 2012.
- ^ „MARS SCIENCE LABORATORY (MSL) MAST CAMERA (MASTCAM)” (na jeziku: (jezik: engleski)). Malin Space Science Systems (MSSS). Pristupljeno 24. 2. 2012.
- ^ David, Leonard (28. 3. 2011). „NASA Nixes 3-D Camera for Next Mars Rover” (na jeziku: (jezik: engleski)). SPACE.com. Pristupljeno 24. 2. 2012. „Neće biti 3D kamere na roveru”
- ^ „Mastcam Instrument Description” (na jeziku: (jezik: engleski)). Pristupljeno 23. 2. 2012.
- ^ „Mars Descent Imager (MARDI)” (na jeziku: (jezik: engleski)). Arhivirano iz originala 07. 08. 2012. g. Pristupljeno 23. 2. 2012.
- ^ „Mars Descent Imager (MARDI) Update” (na jeziku: (jezik: engleski)). MSSS. 12. 11. 2007. Arhivirano iz originala 04. 09. 2012. g. Pristupljeno 23. 2. 2012.
- ^ Wiens, Roger C. „Chemistry & Camera (ChemCam)” (na jeziku: (jezik: engleski)). JPL. Arhivirano iz originala 20. 07. 2011. g. Pristupljeno 26. 2. 2012. „Hemijska kamera”
- ^ „MSL ChemCam on Mars” (na jeziku: (jezik: engleski)). JPL. Pristupljeno 26. 2. 2012.
- ^ Wiens, Roger C. „Chemistry & Camera (ChemCam)” (na jeziku: (jezik: engleski)). Arhivirano iz originala 20. 07. 2011. g. Pristupljeno 26. 2. 2012. „Hemijska kamera”
- ^ „Mars Science Laboratory Rover in the JPL Mars Yard” (na jeziku: (jezik: engleski)). JPL. Arhivirano iz originala 10. 05. 2009. g. Pristupljeno 22. 2. 2012. „Interaktivni materijal”
- ^ „Eyes and Other Senses” (na jeziku: (jezik: engleski)). JPL. Pristupljeno 22. 2. 2012. „Oči rovera i druga čula”
- ^ Klingelhöfer, G.; Bernhardt, B.; Foh, J.; Bonnes, U.; Rodionov, D.; De Souza P. A.; Schroder, C.; Gellert, R.; Kane, S.; Gutlich P.; Kankeleit E. (2002). „The miniaturized Mössbauer spectrometer MIMOS II for extraterrestrial and outdoor terrestrial applications: A status report”. Hyperfine Interactions. 144: 371—379. Bibcode:2002HyInt.144..371K. doi:10.1023/A:1025444209059.
- ^ Klingelhoefer (2007). „THE MINIATURISED MOESSBAUER SPECTROMETER MIMOS II: APPLICATION FOR THE "PHOBOS-GRUNT" MISSION.” (PDF).
- ^ R. Rieder; R. Gellert; J. Brückner; G. Klingelhöfer; G. Dreibus; A. Yen; S. W. Squyres (2003). „The new Athena alpha particle X-ray spectrometer for the Mars Exploration Rovers”. J. Geophysical Research. 108: 8066. Bibcode:2003JGRE..108.8066R. doi:10.1029/2003JE002150.
- ^ „Mars Science Laboratory Sample Acquisition, Sample Processing and Handling: Subsystem Design and Test Challenges” (PDF) (na jeziku: (jezik: engleski)). Pristupljeno 9. 1. 2015.
- ^ „Arm and Hand” (na jeziku: (jezik: engleski)). JPL. Pristupljeno 9. 1. 2015.
- ^ „Curiosity Stretches its Arm” (na jeziku: (jezik: engleski)). JPL. Arhivirano iz originala 23. 08. 2012. g. Pristupljeno 9. 1. 2015.
- ^ „MSL-PIP” (PDF) (na jeziku: (jezik: engleski)). Pristupljeno 9. 1. 2015.
- ^ „MARS SCIENCE LABORATORY ROBOTIC ARM” (PDF) (na jeziku: (jezik: engleski)). Pristupljeno 9. 1. 2015.
- ^ „Lunar Lost & Found: The Search for Old Spacecraft”. www.space.com. Pristupljeno 18. 3. 2009.
- ^ „Luna 17 and Lunokhod 1”. www.zarya.info. Arhivirano iz originala 15. 05. 2011. g. Pristupljeno 23. 8. 2009.
- ^ „Experiment: Lunar Rover Vehicle”. Ares.jsc.nasa.gov. Arhivirano iz originala 20. 3. 2009. g. Pristupljeno 18. 3. 2009.
- ^ „Luna 21 and Lunokhod 2”. www.zarya.info. Arhivirano iz originala 29. 03. 2019. g. Pristupljeno 23. 8. 2009.
- ^ Chaikin, Andrew (1. 3. 2004). „The Other Moon Landings”. Air & Space/Smithsonian. Arhivirano iz originala 11. 5. 2014. g. Pristupljeno 25. 5. 2013.
- ^ Page, Lewis (16. 3. 2012). „New NASA snap of game developer's electric cart FOUND ON MOON: Probe in low pass over Garriott's radioactive tub-rover”. The Register. Pristupljeno 25. 5. 2013.
- ^ „Lunokhod 2 Revisited”. NASA. 13. 3. 2012. Arhivirano iz originala 15. 12. 2013. g. Pristupljeno 25. 5. 2013.
- ^ Lakdawalla, Emily (21. 6. 2013). „Is Opportunity near Lunokhod's distance record? Not as close as we used to think!”. The Planetary Society. Pristupljeno 26. 6. 2013.
- ^ Witze, Alexandra (19. 6. 2013). „Space rovers in record race”. Nature News. Pristupljeno 26. 6. 2013.
- ^ „It's Official! NASA confirms Mars Opportunity rover has broken the off-world driving record”. theweathernetwork.com. 29. 7. 2014. Pristupljeno 4. 1. 2015.
- ^ „Trundling Across the Moon”. Lunar Reconnaissance Orbiter Camera. 23. 5. 2014. Pristupljeno 4. 1. 2015.
- ^ a b „Mars Pathfinder”. NASA. Arhivirano iz originala 23. 06. 2015. g. Pristupljeno 18. 3. 2009.
- ^ „Sojourner”. spacepioneers.msu.edu. Arhivirano iz originala 20. 3. 2015. g. Pristupljeno 4. 1. 2015.
- ^ „Sol 89 (3 October 1997) Images”. mars.jpl.nasa.gov. 3. 10. 1997. Pristupljeno 4. 1. 2015.
- ^ Nelson, Jon. „Mars Exploration Rover - Spirit”. NASA. Arhivirano iz originala 28. 01. 2018. g. Pristupljeno 2. 2. 2014.
- ^ Webster, Guy; Brown, Dwayne (28. 7. 2014). „NASA Long-Lived Mars Opportunity Rover Sets Off-World Driving Record”. NASA. Pristupljeno 29. 7. 2014.
- ^ Knapp, Alex (29. 7. 2014). „NASA's Opportunity Rover Sets A Record For Off-World Driving”. Forbes. Pristupljeno 29. 7. 2014.
- ^ Staff, NASA (26. 11. 2011). „Mars Science Laboratory”. NASA. Pristupljeno 26. 11. 2011.
- ^ Associated Press (26. 11. 2011). „NASA Launches Super-Size Rover to Mars: 'Go, Go!'”. New York Times. Pristupljeno 26. 11. 2011.
- ^ a b Webster, Guy; Jones, Nancy Neal; Brown, Dwayne (16. 12. 2014). „NASA Rover Finds Active and Ancient Organic Chemistry on Mars”. NASA. Pristupljeno 16. 12. 2014.
- ^ a b Chang, Kenneth (16. 12. 2014). „‘A Great Moment’: Rover Finds Clue That Mars May Harbor Life”. New York Times. Pristupljeno 16. 12. 2014.
- ^ „China moon rover enters lunar orbit”. spacedaily.com. 6. 12. 2013.
- ^ „China lands Jade Rabbit robot rover on Moon”. BBC. 14. 12. 2013.
- ^ Barbosa, Rui C. (14. 12. 2013). „China's Chang'e-3 and Jade Rabbit duo land on the Moon”. NASAspaceflight.com. Pristupljeno 14. 12. 2013.
- ^ McKirdy, Euan (13. 2. 2014). „Down but not out: Jade Rabbit comes back from the dead”. CNN.
- ^ „China Celebrates Lunar Probe and Announces Return Plans”. New York Times. 16. 12. 2013. Pristupljeno 16. 12. 2013.
- ^ „China plans to launch Chang'e 5 in 2017”. Xinhuanet. 16. 12. 2013.
- ^ „China's Lunar Probe Tester Ready for Chang'e 5 Mission”. CRIENGLISH.com. 11. 8. 2014. Arhivirano iz originala 18. 08. 2017. g. Pristupljeno 27. 12. 2014.
- ^ „Chandrayaan-2: India to go it alone”. The Hindu. 22. 1. 2013.
- ^ „India to launch Chandrayaan- II by 2016-17”. Hindustan Times. 10. 1. 2014. Arhivirano iz originala 17. 03. 2014. g. Pristupljeno 27. 12. 2014.
- ^ „Chandrayaan-2 to be finalised in 6 months”. The Hindu. 7. 9. 2007. Arhivirano iz originala 23. 10. 2008. g. Pristupljeno 22. 10. 2008.
- ^ „Chandrayaan-II will try out new ideas, technologies”. The Week. 7. 9. 2010. Arhivirano iz originala 14. 07. 2011. g. Pristupljeno 7. 9. 2010.
- ^ „Landing spots for Chandrayaan-2 identified”. DNA India. 21. 2. 2014. Pristupljeno 23. 2. 2014.
- ^ „ISRO plans Moon rover”. Chennai, India: The Hindu. 4. 1. 2007. Arhivirano iz originala 14. 09. 2007. g. Pristupljeno 22. 10. 2008.
- ^ „ExoMars Rover ESA Portal”. ESA.
- ^ Nelson, Jon. „Mars Exploration Program: 2020 Mission”. NASA. Arhivirano iz originala 20. 07. 2014. g. Pristupljeno 13. 6. 2014.
- ^ a b Chang, Alicia (9. 7. 2013). „Panel: Next Mars rover should gather rocks, soil”. AP News. Pristupljeno 12. 7. 2013.
- ^ a b Cowing, Keith (21. 12. 2012). „Science Definition Team for the 2020 Mars Rover”. NASA. SpaceRef. Arhivirano iz originala 03. 02. 2013. g. Pristupljeno 21. 12. 2012.
- ^ Harwood, William (4. 12. 2012). „NASA announces plans for new $1.5 billion Mars rover”. CNET. Pristupljeno 5. 12. 2012. „Using spare parts and mission plans developed for NASA's Curiosity Mars rover, the space agency says it can build and launch a new rover in 2020 and stay within current budget guidelines.”
- ^ Amos, Jonathan (4. 12. 2012). „Nasa to send new rover to Mars in 2020”. BBC News. Pristupljeno 5. 12. 2012.
- ^ Webster, Guy; Brown, Dwayne (21. 1. 2014). „NASA Receives Mars 2020 Rover Instrument Proposals for Evaluation”. NASA. Pristupljeno 21. 1. 2014.
- ^ Timmer, John (1. 8. 2014). „NASA announces the instruments for the next Mars rover”. NASA. Pristupljeno 4. 1. 2015.
- ^ Brown, Dwayne (31. 7. 2014). „RELEASE 14-208 - NASA Announces Mars 2020 Rover Payload to Explore the Red Planet as Never Before”. NASA. Pristupljeno 31. 7. 2014.
- ^ Brown, Dwayne (31. 7. 2014). „NASA Announces Mars 2020 Rover Payload to Explore the Red Planet as Never Before”. NASA. Pristupljeno 31. 7. 2014.
Spoljašnje veze[uredi | uredi izvor]
| Normativna kontrola: Državne |
|---|