Marsova naučna laboratorija (engl.Mars Science Laboratory), ili skraćeno MNL, robotska je sonda Nacionalne vazduhoplovne i svemirske administracije. Namena joj je da se pomoću nje dođe do saznanja o postojanju tragova i uslova za život na Marsu. Glavna komponenta sistema je rover nazvan Kjuriositi (Radoznalost, engl.Curiosity).[1]Rover (drugi naziv planetarni rover) je robotizovano vozilo za istraživanje svemira projektovano za kretanje po površini planete ili nekog drugog nebeskog tela. Može se koristiti za transport ljudske posade (američki astronauti su ih koristili tokom misija na Mesec), ili se autonomno kretati bez slanja komandi sa Zemlje. Obično ih dostavljaju letelice, koje se spuštaju prema površini planete malom brzinom (mekano sletanje). Ove letelice se nazivaju lenderi.
Lansiranje se dogodilo 26. novembra2011. u 15.02.00.211 UTC, a sletanje na površinu planete, u Gejl krater, 6. avgusta2012. godine u 05.17.57 UTC. Uz pomoć novih principa sletanja, rover se spustio na Mars, većom preciznošću od dosadašnjih sondi. Primaran cilj rovera je da pokuša da otkrije da li je trenutno ili u prošlosti Mars bio pogodan za razvoj života, mada neće tragati za nekim određenim njegovim oblicima. Umesto toga, rover će hemijski analizirati uzorke na različite načine, između ostalog skupljati uzorke tla, bušiti stene i koristiti laser i prateće senzore.[2]
Rover Kjuriositi je skoro pet puta veći od rovera Spirit i Oportjuniti, a nosi i obimniju opremu, deset puta veće mase, u odnosu na prethodne. Rover je lansiran raketomAtlas V-541 i nakon svog puta do planete i sletanja na njenu površinu bi trebalo da vrši naučna istraživanja tokom 687 zemaljskih dana (1 godina na Marsu), i da pređe 5-20 km.[3]
Rover Kjuriositi je dug 3 m i ima masu 900 kg, uključujući 80 kg opreme za naučna merenja i istraživanja.[6] Približan je dimenzijama Mini Kuper automobila, mnogo je veći od prethodnih rovera Spirit i Oportjuniti koji su dužine 1,5 m, mase 174 kg i nose 6,8 kg opreme za naučna istraživanja.
Brzina:
Kada se spusti na površinu, rover će moći da pređe preko prepreka visine 75 cm. Maksimalna brzina kretanja je procenjena na 90 m/h, automatskom navigacijom. Međutim, prosečna brzina kretanja će verovatno biti oko 30 m/h, u zavisnosti od snage napajanja, konfiguracije terena, naleganja na tlo i vidljivosti. Od MNL se očekuje da pređe do 19 km tokom svoje dvogodišnje misije.[7]
Izvor napajanja:
Kjuriositi se napaja radioizotopnim termoelektričnim generatorom, kao i Viking 1 i Viking 2 lenderi 1976. godine.[8][9] Sistemi radioizotopnog napajanja su generatori koji proizvode električnu energiju iz prirodnog raspada plutonijuma-238 koji je nefisioni izotop plutonijuma. Toplota koja se oslobađa prirodnim raspadom ovog izotopa se pretvara u električnu energiju čime se obezbeđuje konstantno napajanje tokom svih godišnjih doba kao i tokom dana i noći. Višak toplote se može odvesti cevima za zagrevanje sistema čime se oslobađa električna energija za operaciju rovera i instrumenata. RTG-ovi ovog rovera su napunjeni sa 4,8 kg plutonijum-238 dioksida koji je obezbedio Odsek za energiju SAD, spakovan u 32 palete veličine maršmeloa.
Generatori ugrađeni na Kjuriositi su najnovija generacija RTG generatora koje je konstruisao Boing, nazvanih ”Multimisioni radioizotopni termoelektrični generatori“ ili MMRTG.[10] Bazirani su na klasičnoj RTG tehnologiji, predstavljaju fleksibilniju i kompaktniju opciju, projektovanu da obezbedi 125 vati električne energije i 2.000 vati toplotne energije na početku misije. MMRTG proizvode sve manje energije jer se troši plutonijumski izvor; nakon 14 godina (što predstavlja minimalno trajanje plutonijumskog goriva) električna energija opada na 100 vati.[11] Marsova naučna laboratorija će proizvoditi 2,5 kilovat časa na dan, mnogo više od prethodnih rovera sa solarnim napajanjem, koji proizvode 0,6 kilovat časova.
Prikaz sklopova MMRTG.
Sistem odvođenja toplote:
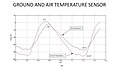
Temperature, u području sletanja rovera, variraju od +30 do -127 °C. Stoga sistem za odvođenje toplote koristi tečnost koja se sprovodi kroz cevi dužine 60 m, koje su raspoređene kroz ceo rover, da bi se osetljive komponente držale na optimalnoj temperaturi.[12] Druge metode zagrevanja unutrašnjih komponenti uključuju korišćenje toplote koja se proizvodi u roveru i dobijenog viška od MMRTG-a. Sistem takođe poseduje mogućnost da hladi komponente u slučaju da je to potrebno.
Računari:
Dva identična računara unutar rovera, sačinjavaju njegov informatički sistem (RCE), koji sadrži zaštićenu memoriju od visoke radijacije iz svemira. Svaki memorijski modul ima 256 KBEEPROM, 256 MBDRAM i 2 GBfleš memorije.[13] U poređenju, Mars eksplorejšn roveri imaju 3 MB EEPROM, 128 MB DRAM i 256 MB fleš memorije. RCE računari koriste procesorRAD750, koji je naslednik procesora RAD6000, korišćenog kod MER. RAD750 je sposoban za 400 miliona operacija u sekundi, dok je RAD6000 sposoban za 35 MIPS.[14][15][16] Od dva računara u roveru, jedan služi kao rezerva, u slučaju da zakaže primarni.
Rover poseduje unutrašnju mernu jedinicu (engl.Internal measurement unit – IMU) koja obezbeđuje podatke o položaju rovera u odnosu na 3 ose, a ti podaci se koriste pri navigaciji i upravljanju roverom. Računari su u konstantnom režimu nadgledanja, radi održanja rovera u neprekidnom operativnom stanju. Aktivnosti poput fotografisanja, upravljanja i rada opreme, izvršavaju se na osnovu komandnih signala, koji se šalju sa Zemlje.
Komunikacija:
Kjuriositi ima dva načina komunikacije — X talasni transponder koji ima mogućnost da direktno komunicira sa Zemljom, i UHF radio za komunikaciju sa orbiterima u orbiti oko Marsa. Komunikacija sa orbiterima će biti glavno sredstvo slanja podataka, pošto orbiteri imaju jače napajanje i veće antene.[17] U trenutku sletanja, signalu će biti potrebno 13 minuta i 46 sekundi da stigne do Zemlje.[18]
Sistem kretanja:
Kao i prethodni Mars eksplorejšn roveri i Mars patfajnder, Kjuriositi je opremljen sa 6 točkova s posebnim vešanjem. Sistem vešanja će takođe biti upotrebljen kao stajni organi pri sletanju. Točkovi će biti značajno veći nego kog prethodnih rovera. Na svakom točku je ostavljen poseban šablon koji poboljšava naleganje, ali takođe ostavlja otiske na peskovitoj površini Marsa. Ovi otisci služe kao „zapis“ kamerama za proračun pređenog puta. „Zapis“ je napisan Morzeovom azbukom i predstavlja slova JPL (·--- ·--· ·-··).[19]
Na slici se vide tipovi tri generacije rovera koji su poslati na Mars.
Poređenje točkova: Sodžurner, Mars eksplorejšn roveri, Marsova naučna laboratorija.
Rover tokom testova mobilnosti. Na točkovima se može videti šablon JPL u Morzeovoj azbuci.
Stubna kamera (engl.MastCam): ovaj instrument omogućava snimanje fotografija u vidljivom i drugim spektrima pomoću dve kamere.[26] Ove kamere snimaju fotografije u boji rezolucije 1.600 x 1.200 piksela, i kompresovan video visoke definicije (10 frejmova u sekundi) rezolucije 720p (1.280 x 720). Jedna kamera će biti kamera srednjeg ugla (Medium Angle Camera — MAC) žižne daljine 34 mm, vidnog polja 15° i proizvodi razmeru od 22 cm po pikselu sa udaljenosti od 1 km. Druga kamera će biti kamera uskog ugla (Narrow Angle Camera — NAC) žižne daljine 100 mm, vidnog polja 15° i proizvodi razmeru od 7,4 cm po pikselu sa udaljenosti od 1 km.[26] Malin korporacija je takođe razvila par ovih kamera sa posebnim objektivom koji poseduje mogućnost zumiranja,[27] ali one nisu uključene u konačan projekat jer njihovo ispitivanje nije moglo da se završi u roku do lansiranja prema Marsu 2011. godine.[28] Svaka kamera će imati 8 GB fleš memorije što omogućava skladištenje preko 5.500 slika.[26] Kamere takođe poseduju autofokus što im omogućava da fokusiraju objekte udaljene od 2,1 m do beskonačnosti.[29]
Kamera robotske ruke — MAHLI.
U poređenju sa kamerama Mars eksplorejšn rovera (crno-bele panoramske kamere rezolucije 1.200 x 1.200 piksela) MAC MastCam kamera ima 1,25x veću prostornu rezoluciju, a NAC MastCam 3,67x veću prostornu rezoluciju.[29]
Kamera robotske ruke (engl.Mars Hand Lens Imager) — MAHLI: ovaj uređaj se sastoji od kamere montirane na robotskoj ruci rovera koja se koristi za mikroskopsko fotografisanje kamenja i zemljišta. Kamera snima fotografije u boji rezolucije 1.600 x 1.200 piksela, pri čemu rezolucija po piskelu dostiže 14,5 mikrometara. MAHLI ima žižnu daljinu od 18,3 mm do 21,3 mm i vidno polje od 33,8 do 38,5°.[26] Kamera poseduje belo i ultraljubičasto LED osvetljenje za slikanje u mraku ili za slikanje fluorescencije. Tu je i mogućnost mehaničkog fokusiranja od beskonačnosti pa sve do udaljenosti od svega nekoliko milimetara.[26]
Kamera za slikanje pri sletanju (engl.MSL Mars Descent Imager) — MARDI:
Kamera za slikanje pri sletanju — MARDI.
Tokom sletanja na površinu Marsa MARDI će konstantno fotografisati okruženje, pri čemu će slike biti 1.600 x 1.200 piksela i ekspozicijom od 1,3 milisekundi. Prikupljanje fotografija počinje na visini od 3,7 km pa sve do 5 m iznad površine, svake sekunde se prikupi 5 slika a celokupan proces će trajati oko 2 minuta.[30][31] Veličina piksela će biti 1,5 m sa visine od 2 km pa sve do 1,5 mm sa visine 2 m, dok je vidno polje 90°. MARDI ima unutrašnju memoriju veličine 8 GB što omogućava skladištenje 4.000 fotografija. Ove fotogafije će pomoći timu rovera da se upozna sa okruženjem i konfiguracijom terena mesta sletanja što će pomoći pri operacijama i naučnim istraživanjima.[30]
Čini sistem, koji se sastoji od dva uređaja za daljinsko istraživanje (bez fizičkog kontakta). Prvi je laserski indukovana spektroskopija (Laser-induced breakdown spectroscopy — LIBS) koja je po prvi put upotrebljena na nekoj svemirskoj misiji, a drugi je daljinska mikro-kamera (Remote micro-imager RMI).[32][33] LIBS je uređaj koji može laserskim snopom da osvetli stenu, ili neki deo terena sa udaljenosti od 7 m pri čemu deo tog materijala isparava i zatim se
Umetnikovo viđenje — rover koristi ChemCam instrument.
spektralnom analizom sastava gasova utvrđuju njegova svojstva. Talasna dužina laserskog snopa je 1.067 nm, sa pulsom od 5 nanosekundi. Detekcija lopte svetleće plazme će biti vršena u vidljivom kao i u ultraljubičastom i infracrvenom spektru, talasne dužine 240 nm i 800 nm.[34] Koristeći istu optiku RMI obezbeđuje kontekstne slike mesta koja analizira LIBS. RMI može da razazna objekte veličine 1 mm sa udaljenosti od 10 m i sa te udaljenosti ima vidno polje 20 cm.[34] ChemCam instrument je razvila Nacionalna laboratorija u Los Alamosu u saradnji sa francuskom CESR laboratorijom.[34][35][36] NASA je utrošila 10 miliona dolara na razvoj ChemCam uređaja, uključujući i oko 1,5 miliona dolara prekoračenja definisanog budžeta, što je oko 0,05% ukupnog budžeta cele misije. Francuska svemirska agencija dostavila je prototip stuba sa uređajem, laboratoriji u Los Alamosu, a zatim i konačan model Laboratoriji za mlazni pogon u februaru2008.[37]
Ovaj spektrometar će ozračiti uređaje alfa-česticama i mapirati spektar Х-zraka koji se pritom odbiju nazad da bi se utvrdio elementarni sastav uzorka.
APXS je varijanta rendgen emisije indukovane česticama (Particle-induced X-ray emission — PIXE) koja je prethodno korišćena kod misija Mars patfajnder i Mars eksplorejšon rover. Instrument je dizajnirala i napravila Kanadska svemirska agencija.[38]
Hemija i mineralogija (engl.Chemistry and Mineralogy) — ChemMin:
Uređaj rendgenske strukturne analize i rendgenske fluorescencije[39] i jedan je od četiri spektrometra koja ima rover. On će identifikovati i odrediti kolika je rasprostranjenost minerala na Marsu. Konstruisali su ga Istraživački centar Ejms i Laboratorija za mlazni pogon. Rover će bušenjem sitniti stene i rezultujući usitnjeni materijal ispitati uz pomoć ovog instrumenta. Snop rendgenskih zraka se usmerava kroz ovaj prah tako da unutrašnja kristalna struktura minerala skreće snop i stvara obrazac rendgenskih zraka. Svi minerali skreću rendgenske zrake na specifičan način i stvaraju unikatne obrasce (poput otiska prsta kod čoveka), tako da naučnici mogu da odrede strukturu minerala sa kojima će se rover susretati.[39]
Analiza uzoraka na Marsu (engl.Sample analysis at Mars) — SAM:
Ovaj skup uređaja analizira organska jedinjenja i gasove kako iz same atmosfere tako i iz čvrstih uzoraka.[40][41] Razvijen je u partnerstvu Godard spejs flajt centra, francuske atmosferske laboratorije i nekoliko drugih kooperanata.[40][42] SAM se sastoji od tri posebna instrumenta:
SAM paket instrumenata.
Kvadrupolni maseni spektrometar (engl.Quadrupole Mass Spectrometer) — QMS: će detektovati gasove iz atmosfere ili one koji se oslobađaju iz uzoraka prilikom njihovog zagrevanja.[40]
Gasni hromatograf (engl.Gas Chromatograph) — GC: će se koristiti za izdvajanje specifičnih gasova iz složenih jedinjenja u molekulske komponente sa opsegom mase 2–235 u.[40]
Detektor za procenu radijacije (engl.Radiation assessment detector) — RAD:
Ovaj uređaj je prvi uključen, u okviru opreme MNL. Tokom puta ka Marsu i za vreme istraživanja po površini, ovaj uređaj će karakterisati širok spektar radijacionih okruženja kroz koja će rover proći. Ovakva merenja nikada do sada nisu obavljena iz unutrašnjosti letelice i njihov glavni cilj je da utvrdi nivo zaštite koji će biti potreban ljudskim istraživačima. Razvijen je u kooperaciji jugozapadnog istraživačkog instituta (SwRI) iz San Antonija i univerziteta u Kilu u Nemačkoj.[44]
Dinamički albedo neutrona (engl.Dynamic albedo of neutrons) — DAN:
Pulsni izvor i detektor neutrona za merenje vodonika i vode ili leda na površini ili odmah ispod površine Marsa. Uređaj je obezbedila federalna kosmička agencijaRusije.[45]
Stanica za praćenje roverovog okruženja (engl.Rover environmental monitoring station) — REMS:
Meteorološki paket i senzor ultraljubičastog zračenja koji je obezbedilo špansko ministarstvo obrazovanja i nauke u saradnji sa finskim meteorološkim institutom.[46][47] Biće postavljen na stub kamere i meriće atmosferski pritisak, vlažnost vazduha, strujanje i jačinu vetra, temperaturu tla i vazduha kao i nivo ultraljubičastog zračenja. Svi senzori su grupisani oko tri elementa: dve grane prikačene na stub za daljinsko nadgledanje (Remote Sensing Mast — RSM), sklopa ultraljubičastog senzora (Ultraviolet Sensor — UVS) koji se nalazi na gornjoj strani rovera i jedinice za kontrolu instrumenata (Instrument Control Unit — ICU) koja se nalazi unutar rovera. REMS će pružiti nove tragove o sveopštoj cirkulaciji Marsa, lokalizovanim vremenskim sistemima, lokalnim hidrološkim ciklusima, štetnosti ultraljubičastog zračenja i mogućnosti naseljenja ispod površine na osnovu interakcije između atmosfere i zemljišta.[46]
Oprema za ulazak u atmosferu i sletanje (engl.MSL entry descent and landing instrumentation) — MEDLI:
Glavni zadatak MEDLI projekta je da nadgleda aerotermalna okruženja, potpovršinske promene materijala toplotnog štita, orijentaciju rovera i gustinu atmosfere tokom ulaska kroz atmosferu sve do odvajanja toplotnog štita i oslobađanja rovera.[48][49] MEDLI paket sa uređajima će biti instaliran unutar toplotnog štita ulaznog vozila. Prikupljeni podaci će olakšati rad budućih misija time što će obezbediti podatke o atmosferi za potvrdu modela Marsove atmosfere i za određivanje tačnih specifikacija pri planiranju misija.
Šematski prikaz instrumenata rovera.
MEDLI se sastoji od tri glavna podsistema: MEDLI integrisani utikači senzora (MEDLI Integrated Sensor Plugs — MISP), sistem podataka pri ulasku u atmosferu Marsa (Mars Entry Atmospheric Data System — MEADS) i elektronika za podršku sistema (Sensor Support Electronics — SSE).
Kamere za izbegavanje prepreka (engl.Hazard avoidance cameras) — Hazcams:
MNL će koristiti dva para crno-belih navigacionih kamera postavljenih levo i desno na prednjoj i na zadnjoj strani rovera.[50][51] One se koriste za automatsko izbegavanje prepreka pri vožnji rovera i za pozicioniranje robotske ruke pri terenskim ispitivanjima. Kamere će slikati u vidljivom spektru i tako sklapati 3D stereoskopske fotografije. Kamere imaju vidno polje od 120° i mogu da mapiraju teren, 3 metra ispred rovera. Ove fotografije služe kao sigurnosna mera da se rover ne bi slučajno sudario sa nekom preprekom, i radi u tandemu sa softverom koji omogućuje roveru da sam donosi pouzdane odluke.[50]
MNL će koristiti par crno-belih navigacionih kamera postavljenih na stub za podršku kretanju po terenu.[50][51] Kamere će slikati u vidljivom spektru i tako sklapati 3D stereoskopske fotografije. Kamere imaju vidno polje od 45°.[51]
Gejl krater sa elipsom koja označava mesto sletanja. Strelice pokazuju dve lokacije koje su od velikog interesa za naučnike (duboki kanjoni).[53]
Glavno pitanje pri izboru optimalnog mesta za sletanje je identifikacija specifičnog geološkog okruženja (ili skupa okruženja) koja bi mogla da podrže mikrobiološki život. Da bi se smanjio rizik od neuspeha i osigurala najveća šansa za ostvarivanje naučnih ciljeva, naglasak se stavlja na mesta koja imaju veliki broj naučnih ciljeva. Shodno tome, mesto sletanja sa morfološkim i mineraloškim dokazima o vodi u prošlosti ima prednost pri izboru u odnosu na mesta bez ovih karakteristika. Mesta čija spektralna analiza ukazuje na hidrirane minerale, minerale gline i soli sulfata takođe ukazuju na bogato nalazište. Hematit, oksidi gvožđa, minerali sulfata i silicijuma, silicijum dioksid, a možda i hloridni minerali spadaju u podloge koje su pogodne za očuvanje fosila. Svi oni su pronađeni pri iskopavanjima fosila na Zemlji.[54] Težak teren je najbolji kandidat za nalaženje dokaza o uslovima za život, tako da inženjeri moraju biti sigurni da rover može da im pristupi i kreće se po njima.
Zbog tehničkih ograničenja mesto sletanja moralo je da bude udaljeno najviše 45° od Marsovog ekvatora, i da ima visinu manju od 1 km u odnosu na referentnu nultu tačku.[55] Na prvoj radionici za izbor mesta sletanja odabrane su 33 potencijalne lokacije.[56] Do druge radionice koja je održana krajem 2007. godine, broj lokacija se popeo na 50,[57] ali se do završetka ove radionice ovaj broj smanjio na šest.[58][59][60] U novembru 2008. godine, na trećoj radionici lideri projekta su sveli izbor na četiri potencijalne lokacije:[61][62][63]
Četvrta radionica održana je krajem septembra 2010. godine,[68] a peta i poslednja od 16. do 18. maja2011. godine.[69]Gejl krater je odabran za mesto sletanja marsove naučne laboratorije 22. jula 2011. godine.[70][71][72]
Mesta koja bi rover mogao da istraži. Prikazana elipsa je dimenzija 20 x 25 km.
Na osnovu rangiranja mesta za sletanje koje su uradili istražitelji projekta, administratori agencije NASA odabrali su Gejl krater za mesto sletanja rovera.[70][71][72] Unutar Gejl kratera nalazi se planina sastavljena od slojevitog materijala koja se uzdiže 5 km izbad poda kratera koju će Kjuriositi istražiti. Mesto sletanja je ravan predeo odmah pored planine koja se uzdiže u sredini. Rover bi trebalo da se prizemlji unutar elipse dimenzija 20 x 25 km unutar kratera čiji je prečnik 154 km.
Na mestu sletanja rovera nataložen je materijal koji se sprao sa zidova kratera koji će naučnicima pružiti šansu da istraže stene koje čine temelj (osnovu) ove oblasti. Elipsa takođe obuhvata veoma gust i svetlo obojen tip stena koji do sada nije istražen na površini planete. Postoji mogućnost da su te stene naslage iz prastarih slatkovodnih močvara i one će biti prva meta u potrazi rovera za organskim molekulima.[73]
Međutim, oblast od najvećeg naučnog interesa za rover je u podnožju planine, odmah izvan elipse sletanja, preko polja tamnih dina. Na ovoj lokaciji instrumenti na orbiterima su otkrili prisustvo minerala gline i soli sulfata.[74] Naučnici koji se bave istraživanjem Marsa imaju nekoliko hipoteza koje objašnjavaju kako ovi minerali ukazuju na promene koje su se dogodile okruženju, posebno promene količine vode na površini planete.
Rover će koristiti sve svoje instrumente za utvrđivanje porekla ovih minerala. Ove stene su još jedna od primarnih meta u potrazi za organskim jedinjenjima pošto su ovakva okruženja mogla da podrže nastanak mikroorganizama.
Dva kanjona su urezana kroz slojeve materijala koji sadrže minerale gline i soli sulfata nataložene nakon formiranja slojeva. Ovi kanjoni izlažu slojeve stena koji sadrže desetine ili stotine miliona godina klimatskih promena. Kjuriositi će možda moći da istraži ove slojeve u delovima kanjona koji su najbliži mestu sletanja i tako pristupiti podacima o promenama okruženja na Marsu. Kanjoni takođe sadrže sediment koji je nanela voda prilikom nastanka kanjona.[75] Ovi sedimenti su bili u kontaktu sa vodom u vreme kada je ova sredina možda bila naseljena nekim oblicima života. Tako da su naslage u podnožju kanjona treća meta u potrazi za organskim jedinjenjima.
Krstareći modul upravlja marsovom naučnom laboratorijom tokom leta od Zemlje do Marsa. Sadrži komponente za regulaciju temperature i komunikaciju sa kontrolom misije. Pre ulaska u atmosferu planete ovaj modul se odbacuje.
Kapsula
Kapsula sadrži silaznu fazu. Ona štiti rover od elemenata tokom krstarenja do planete i opterećenja prilikom ulaska u Marsovu atmosferu. Na gornjem delu su skladišteni padobrani koji će usporiti spuštanje kapsule. Pored njih se takođe nalaze antene za komunikaciju.
Silazna faza
Nakon što su ispunili svoj zadatak toplotni štit i kapsula se odvajaju i oslobađaju silaznu fazu. Ona obezbeđuje sigurno i precizno postavljanje rovera na površinu Marsa što se postiže upotrebom radara i pojedinačnom kontrolom raketnih motora. U ovoj fazi su takođe važne komunikacione komponente, koje se koriste tokom faze krstarenja.
Rover Radoznalost
Rover Kjuriositi je srž misije i on sadrži sve najvažnije naučne sisteme kao i delove komunikacionog sistema. Tokom krstarenja stajni organi rovera su kinematski sklopljeni, radi uštede prostora unutar kapsule.
Toplotni štit
Toplotni štit, kako mu samo ime sugeriše, štiti komponente od veoma visokih temperatura prilikom ulaska u atmosferu Marsa.
Celokupan sistem
Tokom faze krstarenja celokupan sistem je mase 3.400 kg[76] i konstruisan je tako da može da izdrži sva naprezanja od lansiranja do dolaska na površinu Marsa.
Spustiti objekat velike mase na površinu Marsa je veliki izazov. Atmosfera je dovoljno gusta da spreči usporavanje i sletanje na površinu pomoću raketnih motora (poput sistema korišćenih kod sletanja na Mesec), ali je takođe dovoljno retka da spreči sletanje samo uz upotrebu padobrana.[77] Mada su neke prethodne misije koristile vazdušne jastuke za ublažavanje sletanja, Kjuriositi je prevelika da bi ovaj sistem mogao da se upotrebi.
Za spuštanje Kjuriositi na površinu Marsa biće korišćen nov sistem za ulazak, spuštanje i sletanje (engl.entry, descent, and landing — EDL) koji će omogućiti prizemljenje u elipsu prečnika samo 20 km. Prethodni sistemi za sletanje korišćeni za spuštanje rovera na površinu mogli su da spuste sondu u elipsu dimenzija 150 km x 20 km.[78] Da bi se postigla željena preciznost MNL koristi više sistema koji rade u tačno određenom redosledu. Sekvenca za ulazak, spuštanje i sletanje se razlaže na četiri dela:[79][80]
Navođeni ulazak:
Padobran MNL ima prečnik 16 metara.
rover je skupljen unutar kapsule koja ga štiti tokom putovanja kroz svemir od Zemlje i tokom ulaska kroz atmosferu Marsa. Ulazak kroz atmosferu se postiže uz pomoć PICA toplotnog štita (engl.Phenolic Impregnated Carbon Ablator). Ovaj toplotni štit prečnika 4,5 m biće najveći toplotni štit ikada poslat u svemir.[81] Njegova uloga je da smanji brzinu kretanja sonde sa međuplanetarne transferne koja iznosi 5,3 do 6 km/s na približno 2 maha pri kojoj je moguće otvaranje padobrana. Veliki deo otklanjanja greške pri sletanju se ostvaruje pomoću ulaznog navigacionog algoritma koji je sličan onom koji je korišćen pri povratku Apolo misija sa Meseca na Zemlju. Navođenje koristi silu uzgona koju trpi kapsula da odstrani detektovane greške doleta i tako stigne na predviđeno mesto sletanja. Da bi kapsula imala uzgon njen centar mase je pomeren iz centralne ose što uzrokuje da ugao ulaska u atmosferu bude varijabilan, što takođe vodi poreklo od Apolo komandnog modula. Ovo se postiže nizom balasta koji se mogu odbacivati. Vektor uzgona kontrolišu četiri para potisnika sistema za reaktivno upravljanje (engl.reaction control system — RCS) koji proizvode 500 njutna potiska po paru. Ova sposobnost menjanja pravca uzgona omogućuje sondi da reaguje na uslove okruženja i i da se usmeri ka mestu sletanja. Pre otvaranja padobrana odbacuju se balasti tako da se centar mase vraća u osu. Padobran se otvara na visini od oko 10 km i brzini 470 m/s.[78]
Spuštanje padobranom: kada je navođeni ulazak završen i sonda uspori na 2 maha na visini od oko 10 km toplotni štit će se odvojiti i udaljiti od kapsule. Zatim će se otvoriti nadzvučni padobran[78] kao i kod prethodnih misija. U martu i aprilu 2009. padobran za marsovu naučnu laboratoriju je otvoren u najvećem aerotunelu na svetu i prošao kvalifikaciona testiranja.[82] Padobran ima 80 nosećih užadi, dug je preko 50 metara i ima prečnik skoro 16 metara. Otvaranje ovog padobrana je moguće pri brzini 2,2 maha i proizvodi 289 kilonjutna (30.000 kilograma) aerodinamičkog otpora u atmosferi Marsa.[82]
Spuštanje raketnim motorima: nakon usporavanja padobranom, na visini od 1.8 km i pri brzini od 100 m/s, rover i silazna faza se odvajaju od kapsule.[78] Silazna faza je platforma iznad rovera sa 8 varijabilnih raketnih potisnika koji kao gorivo koriste hidrazin.
Umetnikovo viđenje — „nebeski kran“ spušta rover na površinu.
Svaki raketni potisnik proizvodi 400-3.100 kilonjutna (40-300 kilograma) potiska i razvijeni su na bazi onih koji su korišćeni kod Viking lendera.[83] U međuvremenu, rover će se transformisati iz skupljenog položaja koji je zauzimao tokom krstarenja u konfiguraciju za sletanje, a sve to dok se spušta ispod silazne faze pomoću „nebeskog krana“.
Nebeski kran: ovaj sistem će lagano spustiti rover na površinu Marsa.[78] Sastoji se iz tri sajle koje spuštaju rover i jedne pupčane sajle koja prenosi električne signale između nebeskog krana i rovera. Na udaljenosti od 7,5 m od krana sistem se zaustavlja i rover se spušta na površinu planete. Nakon spuštanja čeka se 2 sekunde na potvrdu da je rover na čvrstoj podlozi a onda se aktiviraju male pirotehničke naprave koje presecaju kablove i oslobađaju nebeski kran od rovera. Kran zatim odleće na bezbednu udaljenost i pada na površinu a rover počinje pripreme za tumaranje po površini Marsa. Planirani „nebeski kran“ sistem nikada do sada nije upotrebljen na nekoj misiji.
Animacija koja prikazuje najznačajnije događaje od lansiranja do sletanja na površinu Marsa.
Operacije rovera na površini planete se mere u marsovskim danima koji se nazivaju sol. 1 sol = 24 sata 39 minuta i 35 sekundi. Sol kada je rover sleteo na površinu je Sol 0.
Sol 0:
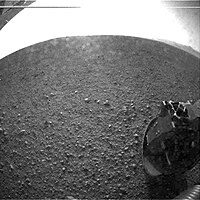
Prva fotografija visoke rezolucije koju je rover poslao sa površine Marsa.
Rover se uspešno prizemljio na površinu crvene planete u 05.17.57 UTC. Signal o uspešnom sletanju je na Zemlju stigao preko sonde Mars Odisej u orbiti oko Marsa, koja je pratila sletanje i slala najbitnije informacije u realnom vremenu nazad u kontrolu misije. Signal je kasnio par minuta jer je Mars u trenutku sletanja bio udaljen više desetina miliona kilometara od Zemlje. Samo par minuta nakon sletanja rover je poslao prvu sliku male rezolucije čime je potvrđeno uspešno prizemljenje.[84] Dva sata nakon sletanja rover je poslao prvu sliku visoke rezolucije (512 x 512 piksela) koja prikazuje okruženje u koje je rover sleteo — kamenito tlo Gejl kratera.[85]
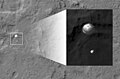
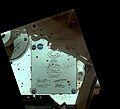
U vreme sletanja u vizuelnom dometu je bila i sonda Orbitalni istraživač Marsa koja je sa udaljenosti od 340 kilometara, pomoću kamere HiRISE, uspela da snimi fotografiju na kojoj se vidi otvoren supersonični padobran prečnika 16 metara. U tom trenutku rover se još uvek nalazio spakovan unutar zaštitne školjke i na približno 3 kilometra iznad površine Marsa.[86] Par sati nakon sletanja stiglo je i 297 fotografija kamere MARDI. Ove fotografije su rezolucije 192 x 144 piksela, ali se u narednim mesecima misije očekuje puna rezolucija 1600 x 1200 i time će biti sastavljen prvi video sletanja na drugu planetu u visokoj rezoluciji.[87] Tokom prvog sola ukupno je na Zemlju poslato oko 5 megabajta podataka putem sonde Mars Odisej.
Sol 1 i 2:
Serija fotografija prikazuje uticaj ChemCam instrumenta na stenu.
Rover vrši testiranje unutrašnjih sistema. Tokom naleta orbitera ka kontroli misije se putem UHF signala šalju dodatne slike, uključujući i fotografije u punoj rezoluciji kamere MARDI. Glavna antena rovera je uspešno usmerena ka Zemlji. Stub rovera je uspešno podignut u uspravan položaj i izvršeno je više pokreta kako bi se utvrdila njegova ispravnost. Izmerena je količina površinske radijacije pomoću instrumenta RAD, ali ti podaci tek treba da se pošalju ka Zemlji. Unutrašnja temperatura rovera je blago povišena, ali uzrok tome nije tehničke prirode već je temperatura unutar Gejl kratera viša od predviđene.[88]
Sol 4 i 5: Rover je poslao prve slike Gejl kratera u visokoj rezoluciji.[89] Izvršene su pripreme za „transplantaciju mozga“ rovera. Tokom krstarenja i ulaska u atmosferu Marsa memorija rovera je bila ispunjena programom za sletanje. Ovaj program sadrži samo najosnovnije komande za prvih par dana na površini planete nakon sletanja. Programeri će u narednim danima poslati novi softver koji će biti instaliran u primarni i sekundarni kompjuter rovera. Ovaj softver sadrži sve najbitnije komande za vožnju, operacije robotske ruke, kamera i svih instrumenata na roveru.[90]
Sol 8: Letelica Orbitalni istraživač Marsa šalje sliku u boji kamere HiRISE na kojoj se vidi rover.[91]
Sol 11:
Test zadnjeg desnog točka rovera, kao priprema za prvu vožnju. (Sol 15)
Tim istražitelja je odredio ciljeve u okolini sletanja koji će biti istraženi roverom. Prva stanica će biti mesto nazvano Glenelg (engl.Glenelg), udaljeno oko 400 metara jugoistočno od mesta sletanja. Na ovoj lokaciji se nalaze slojevite stene koje su dobra meta za bušenje pomoću robotske ruke.[92]
Sol 13 i 14: Rover je prvi put upotrebio instrument ChemCam na kamen veličine pesnice. Tokom perioda od 10 sekundi ispaljeno je 30 laserskih pulseva, svaki od njih snage milion vati i svaki trajanja oko pet nanosekundi.[93] Robotska ruka je „ispružena“ i testirana nizom pokreta da bi se utvrdilo da nije došlo do oštećenja tokom sletanja.[94]
Sol 15 i 16: Instrument REMS je prikupio prve meteorološke podatke. Na osnovu ovih podataka utvrđeno je da se temperatura kreće od -3 do -91 °C. Instrument DAN je počeo da ispaljuje neutrone koji prodiru u tlo i detektuju vodonik koji je na Marsu prisutan u predelima gde ima vode ili minerala koji su bili izloženi vodi. Sistem kretanja je testiran.[95] Dan kasnije rover je prvi put pokrenuo točkove na mestu Bredberi. Tim rovera je odlučio da mesto sletanja nazove po slavnom piscu naučne fantastike Reju Bredberiju, koji je nedavno preminuo. Rover je vozio napred, okrenuo se za 90° a zatim za dužinu rovera unazad. Ovim kretanjem se rover našao oko 6 metara od mesta sletanja. Kontrola misije je primila slike vožnje, kao i slike koje pokazuju kako je ispaljivanje lasera uticalo na stenu koja je ciljana.[96]
Sol 21:MastCam kamera je snimila ovu fotografiju podnožja planine Šarp. Jasno se vide razni slojevi iz geološke istorije Marsa. (Sol 21)Po prvi put u istoriji istraživanja svemira ljudski glas je poslat putem radija ka nekoj planeti i zatim vraćen nazad. Pomoću mreže dubokog svemira inženjeri su ka Marsu poslali snimljenu poruku koju je primio rover Radoznalost i zatim je uputio nazad ka Zemlji. U poruci administrator agencije NASA, Čarls Bolden, govori o poteškoćama sletanja na Mars, upućuje čestitke timu koji je dizajnirao rover i ističe da je radoznalost ta koja podstiče ljude da istražuju. U kontrolu misije su stigle i prve slike kamere MastCam koje prikazuju podnožje planine Šarp i njene slojeve. Glavni inženjer za telekomunikaciju sa roverom je izjavio da je već primljeno više podataka nego od svih prethodnih rovera zajedno.[97]
Sol 22: Nakon dugog čekanja, rover se uputio sa mesta sletanja ka prvoj lokaciji za istraživanje, Glenelg, udaljenoj 400 metara. Tokom 22. dana misije rover je prešao 16 metara ka istoku.[98] Po prvi put u tragovima koje ostavljaju točkovi rovera su se mogla videti slova JPL, napisana Morzeovom azbukom.[99]
Sol 25: Nakon više dana vožnje, rover Kjuriositi je zastao i proveo sol 25 slikajući svoje okruženje. Navigacione kamere su korišćene tokom noći u potrazi za oblacima. Pored toga, rover je prikupio meteorološke podatke.[100]
Sol 29: Rover je prešao 30,5 metara ka jugoistoku. Ovo je najduža vožnja od početka misije i povećava ukupan pređeni put na 109 metara.[101]
Sol 30–34:
Ova panorama se sastoji od devet slika koje je snimila MAHLI kamera tokom 34. dana misije. Prikazuje donju stranu rovera, točkove, a vidljive su i prednje kamere za izbegavanje prepreka.
Nakon više uzastopnih dana vožnje, rover je zastao na par dana da isproba i kalibriše robotsku ruku. Na kraju robotske ruke se nalaze instrumenti koji će biti upotrebljeni za ispitivanje stena i tla na Marsu. Testovi uključuju pozicioniranje iznad površine, rotaciju i uključivanje instrumenata, pozicioniranje za dostavu uzoraka tla u instrumente na gornjoj strani rovera, kao i fotografisanje pomoću kamere MAHLI.[102] Planirane aktivnosti su obustavljene na jedan dan zbog očitavanja o povišenoj temperaturi unutar robotske ruke. Inženjeri su kasnije ustanovili da se ne radi o većem problemu, tako da su testovi nastavljeni sledećeg dana. Izvršeno je testiranje alata za skupljanje uzoraka tla, kao i vibracioni test.[103] Aktivnosti tokom 34. dana misije su potvrdile ispravnost i upotrebljivost MAHLI kamere, koja je korišćena za proveru preciznosti ruke tokom pozicioniranja za više aktivnosti. Po prvi put kamera MAHLI je snimila fotografiju sa otvorenim poklopcem koji služi kao zaštita od prašine. Snimljene su fotografije kamera na vrhu stuba rovera, cela donja strana rovera, kao i kalibracione mete za sam MAHLI instrument. Među ovim metama je i novčić sa likom predsednika SAD Abrahama Linkolna iz 1909. godine. Postavljanje novčića je tradicija geologa da stave objekat poznatih dimenzija naspram uzoraka da bi mogli tačno da odrede njegove osobine. Time je i šira javnost mogla da dobije predstavu koje su veličine objekti ispitivani pomoću ovog instrumenta.[104]
Sol 35–37:
Kjurioziti koristi instrument APXS za analizu stene Džejk Matijević.
Nastavljena je provera instrumenata robotske ruke. Spektrometar alfa-čestica X-zraka (APXS) izvršio je merenje hemijskog sastava kalibracione mete. Zatim je izvršena rotacija i pozicioniranje ruke u neutralan položaj za ispitivanje. Instrument DAN je izvršio merenja tokom šest sati.[105] Sol 37 je poslednji dan testiranja robotske ruke. Tokom dana je izvršen vibracioni test alata koji obrađuje uzorke tla ili usitnjenih stena, koje sakupljaju kašika ili bušilica. Ovaj uređaj poseduje komore za sortiranje uzoraka, pre nego što ih dostavi na analizu drugim instrumentima.[106]
Sol 38–42: Ovo su bili dani vožnje za rover. Pređeni put je bio: 32m, 22m, 37m, 27m i 32m. Tokom vožnji rover je zastajao na svakih 10m kako bi instrument DAN izvršio merenja.[107][108] Tokom 42. sola rover je zastao da snimi prelazak Fobosa i Dejmosa preko sunčevog diska.[109][110]
Sol 44–49: Zbog nepovoljnih uslova za telekomunikaciju sa Zemljom, rover je proveo sol 44 slikajući atmosferske uslove tokom ranog jutra, izvršio inspekciju omanjeg kamena i slikao instrumente na gornjoj strani rovera. Tim koji operiše roverom je odlučio da se približi obližnjem kamenu koji je nazvan Džejk Matijević i na njemu po prvi put isproba instrumente robotske ruke. Džejkob Matijević (1947—2012) bio je glavni inženjer za sva tri rovera koji su upućeni ka površini Marsa.[111] Rover je 46. dana misije prvi put dodirnuo stenu instrumentima koji se nalaze na robotskoj ruci. Prvo je korišćen spektrometar alfa-čestica X-zraka (APXS) koji određuje kakva je hemijska struktura stene. Zatim je kamera MAHLI korišćena za snimke iz blizine. Oba instrumenta su korišćena i na steni Džejk Matijević 47. dana misije. Instrument ChemCam je takođe korišćen 48. sola, tako da su naučnici mogli da uporede očitavanja sa ovog i APXS instrumenta. Nakon toga rover se uputio ka istoku, prešavši 42 metra.[112]
Sol 49 i 50:
Poređenje stena otkrivenih na Marsu (levo), sa stenama koje su nastale u prisustvu vode na Zemlji (desno).
Kjuriositi nastavlja put ka lokaciji Glenelg. Tokom ova dva sola ukupno je prešao 80 m i podigao ukupan pređeni put na 416 m.[113][114]
Sol 51 i 52: Rover je našao dokaze da je na mestu na kome se nalazi nekada u prošlosti tekao brzi potok. Dokazi o postojanju vode na površini Marsa su prikupljeni i ranije, ali Kjuriositi je po prvi put otkrio šljunak koji je vodena bujica nosila sa sobom po koritu potoka. Naučnici proučavaju prikupljene fotografije kamenčića koji su zacementirani u sloju tla. Veličina i oblik kamenčića može pokazati koja je bila brzina i veličina davnog vodenog toka.[115] Narednog sola rover je prešao 37,3 m ka istoku. Nakon vožnje slikani su tragovi rovera da bi se proverilo da li točkovi proklizavaju ili imaju dobro prianjanje. Nakon ove vožnje rover se nalazi na samo par metara od potencijalne lokacije za korišćenje instrumenata na robotskoj ruci.[116]
Sol 53–55: Izvršena je inspekcija obližnje lokacije instrumentima MAHLI i APXS, nakon čega se rover uputio ka novoj lokaciji udaljenoj oko 24 m. Ovu lokaciju su naučnici nazvali Roknest i ona je kandidat za prikupljanje uzoraka tla robotskom rukom.[117]
Sol 56:
Kamera MastCam je snimila ovu fotografiju na kojoj se vidi kašika sa uzorkom tla, i uveličano nepoznati objekat.
Rover se pomerio dodatnih 6 m ka talasu koji je nastao nanosom peska i prašine. Tokom dana takođe su korišćeni instrumenti RAD, DAN i REMS za nadgledanje okruženja oko rovera.[118]
Sol 57:Kjuriositi je „zagazio“ u talas peska kako bi naučnici bolje razumeli raspodelu čestica i gustinu, pre nego što narede roveru da upotrebi svoju kašiku i prikupi uzorke. Kašika ima oblik školjke širine 4,5 cm, dužine 7 cm i može da zahvati oko 3,5 cm u dubinu tla.[119]
Sol 61–63: Kašika robotske ruke je uspešno prikupila uzorak rastresitog tla na lokaciji Roknest. Fotografije su potvrdile da je zahvat prošao po planu. Ruka je protresla uzorak kako bi višak materijala spao sa strana.[120] Tim rovera je odlučio da odloži planirane aktivnosti za sol 62 jer se na jednoj od fotografija vidi sjajan objekat na površini koji je možda deo robotske ruke. Rover će prikupiti dodatne fotografije kako bi tim mogao da utvrdi poreklo objekta i proceni da li će, i koliki uticaj imati na dalje aktivnosti.[121] Slike kamere ChemCam sugerišu da se verovatno radi o malom delu plastike koji je otpao sa rovera, ali će tim iskoristiti još jedan dan da se potvrdi o kom tačno delu se radi. Plan je da se koristi kamera MastCam za slikanje objekta.[122]
Sol 65:
Stena Džejk Matijević. Crvene tačke pokazuju mesta gde je ispaljivan ChemCam laser, dok ljubičasti krugovi pokazuju mesta gde je vršena analiza APXS instrumentom.
Kjuriositi je obavio nekoliko aktivnosti kao pripremu za uzimanje drugog uzorka tla. Kao i u slučaju prvog uzorka, i drugi će biti sa lokacije Roknest i biće iskorišćen za čišćenje unutrašnjih površina alata za sortiranje uzoraka CHIMRA. Alat CHIMRA (engl.Collection and Handling for In-Situ Martian Rock Analysis) u prevodu znači „prikupljanje i sortiranje uzoraka za analizu stena na Marsu“. Nakon odbacivanja prvog (probnog) uzorka, rover je fotografisao unutrašnjost mehanizma kako bi se potvrdilo da nema ostataka od prvog uzorka.[123] Analizom podataka koje je Kjuriositi prikupio tokom ispitivanja stene Džejk Matijević naučnici su došli do zaključka da je njen sastav raznovrsniji nego kod stena koje su analizirane tokom ranijih misija. Stena takođe svojim sastavom podseća na neke stene iz unutrašnjosti Zemlje. Rover je upotrebio dva instrumenta kako bi utvrdio hemijski sastav stene. Rezultati analize potvrđuju da su neka od skorijih merenja tačna i služe kao primer zašto je analiza unutrašnjeg sastava stena tako važan deo cele misije. Sastav stena opisuje u kakvom su okruženju nastale i kakav su uticaj na njih imali planetarni procesi. Na Zemlji, stene sa sastavom sličnim steni Džejk Matijević obično nastaju u procesima koji se dešavaju u mantlu planete, ispod tvrde zemljine kore, tokom kristalizacije magme pod visokim pritiskom.[124]
Sol 66–69: Drugi uzorak, prikupljen tokom 66. dana misije, je takođe odbačen sol kasnije jer je naučni tim strahovao da bi nepoznati svetli materijal, čije poreklo još nije utvrđeno, mogao da ugrozi autentičnost podataka tokom analize.[125] Treći uzorak je prikupljen tokom 69. dana misije i nakon sortiranja CHIMRA mehanizmom, prvi čvrsti uzorak stene je dostavljen na analizu instrumentu CheMin. Analizom će se utvrditi koji se minerali nalaze u sastavu uzorka.[126]
Sol 69–75: Rover je tokom sola 74 prikupio četvrti uzorak tla koji će biti iskorišćen za čišćenje unutrašnjih površina CHIMRA mehanizma. Roveru su poslate instrukcije da mali deo četvrtog uzorka dostavi na tas za opservaciju, kao i da jedan deo uzorka sortira za analizu CheMin instrumentom. Uporedo sa aktivnostima robotske ruke, Kjuriositi je ispitivao svoje okruženje i svim drugim instrumentima: kamere ChemCam i Mastcam su snimale okolni teren, dok su instrumenti RAD, REMS i DAN prikupili podatke o radijaciji, atmosferskim uslovima i prisutnosti vode ispod površine.[127]
Sol 75–82:
Prvi rendgenski snimak marsovskog tla. Sa fotografije se vidi da je sastav tla sličan bazaltnom tlu u okolini vulkana na Havajima.
Tokom 78 dana misije Kjuriositi je kamerom Mastcam posmatrao ponašanje uzoraka stene na opservacionom tasu tokom vibracija robotske ruke.[128]Kjuriositi je 82. dana misije snimio stene u okolini pomoću kamere MAHLI i počeo pripreme za analizu uzorka stene instrumentom CheMin. Tokom prethodnog sola, rover je pomoću SAM instrumenta analizirao uzorak atmosfere Marsa. Nastavljena su i redovna ispitivanja drugim instrumentima.[129] Objavljeni su prvi rezultati analize mineraloškog sastava tla. Ovi podaci ukazuju na to da je tlo Marsa sličnog sastava kao bazaltno tlo u okolini vulkana na Havajima. Ovim podacima se popunjavaju rupe u razumevanju sastava površinskog tla Marsa, ali se i dokazuju pretpostavke naučnika za koje do sada nije bilo dovoljno konkretnih dokaza. Identifikacija minerala u stenama i zemljištu je primarni cilj Kjuriositija, kako bi se stekla znanja o ekološkim uslovima na planeti u prošlosti. U svakom mineralu ostaju zapisani podaci o uslovima okoline u kojoj je nastao. Hemijski sastav stena pruža dvosmislene informacije, za šta su najbolji primer minerali dijamant i grafit koji imaju isti hemijski sastav, ali su im struktura i svojstva potpuno različite. Uzorak za analizu je prvo prošao kroz sito kako bi se odstranile čestice veće od 150 mikrometara, što je približno širini jedne dlake ljudske kose. Uzorak sadrži najmanje dve komponente: prašinu koja se raznosi po celoj površini planete tokom peščanih oluja i sitan pesak koji je lokalnog porekla. Za razliku od većih stena, koje je rover ispitao u proteklim nedeljama, starih par milijardi godina i koje ukazuju na prisustvo vode, uzorci koji su sada analizirani predstavljaju uticaj nedavnih procesa na Marsu, u kojima nije bilo većeg uticaja vode.[130]
Sol 82–89: Nakon tri meseca rada po „marsovskom vremenu“, tim rovera je po planu prešao da radi po standardnom zemaljskom vremenu. Pošto je dan na Marsu (sol) duži oko 40 minuta nego dan na Zemlji, dnevni raspored tima se pomerao par sati unapred svake sedmice, što je značilo da su članovi tima morali da rade do kasno u noć. Počevši od ove sedmice, radni dan članova tima će biti u granicama od 08.00 do 20.00 časova. Ovaj prelazak označava i početak smanjenja broja naučnika koji su direktno uključeni u operacije rovera od sletanja u avgustu. Veći broj naučnika i inženjera će se vratiti svojim regularnim poslovima, ali će biti u kontaktu sa kontrolom misije putem interneta i učestvovaće u planiranju i izvršavanju operacija rovera.[131]
Sol 89–96: Mala količina prašine je postala prvi čvrsti uzorak dostavljen na analizu najvećem instrumentu rovera Kjuriositi. Instrument SAM analizira hemijski sastav uzoraka u potrazi za hemijskim elementima koji omogućavaju opstanak živog sveta. Tokom 9. novembra robotska ruka je dostavila uzorak do instrumenta koji ga je tokom naredna dva dana analizirao masenomspektrometrijom, gasnom hromatografijom i laserskom spektrometrijom. Naučnici su izjavili da su prikupljeni podaci stigli u kontrolu misije i da tokom narednih nedelja sledi njihova detaljna analiza.[132]
Sol 98: Podaci koje je Kjuriositi prikupio o obrascima vetrova i prirodnoj radijaciji pomogli su naučnicima da bolje razumeju uslove koji vladaju na površini crvene planete. Naučnici su pomoću instrumenata identifikovali prolazne vrtloge vazduha, mapirali vetrove u odnosu na padine Gejl kratera, pratili dnevne i sezonske promene u vazdušnom pritisku i uspeli da uoče povezanost između periodičnih promena radijacije sa dnevnim atmosferskim promenama. Znanje stečeno o ovim procesima pomaže istraživačima u razumevanju dokaza o ekološkim promenama na Marsu koje su nekada u prošlosti možda bile pogodne za opstanak života. Dvanaest nedelja nakon sletanja rovera u Gejl krater, međunarodni tim naučnika je iz prikupljenih podataka uspeo da identifikuje više od 20 atmosferskih događaja, od kojih bar jedan ima osobine vrtložnog kretanja vazduha nalik tornadu. Podaci o vetru su prikupljeni instrumentom REMS. U ove osobine spadaju kratak pad u vazdušnom pritisku, promena pravca vetra, promena brzine vetra, povišenje temperature vazduha ili pad ultraljubičaste svetlosti koja stiže do rovera. Dva, od dokumentovanih 20, su imala svih pet karakteristika.
U mnogim regionima na Marsu uočeni su tragovi kretanja i senkepeščanih đavola, kako naučnici nazivaju vrtloge prašine nalik tornadu. Međutim, ovi vizuelni dokazi nisu do sada uočeni unutar Gejl kratera. Jedna mogućnost je da se vrtložni vetrovi kreću unutar kratera, a da pritom ne podižu veliku količinu prašine, kao što je to slučaj u drugim regionima. Prašina ima veliku ulogu u oblikovanju klime na Marsu. Prašina koja se podiže u atmosferu tokom peščanih đavola i peščanih oluja utiče na porast temperature vazduha.
Ova slika prikazuje „toplotne plime“ na Marsu, vremenski fenomen koji je odgovoran za velike, dnevne varijacije u vazdušnom pritisku na površini planete.
Dominantan pravac vetra koji je otkrio instrument REMS iznenadio je naučnike, koji su očekivali da će padine usloviti da se vetar kreće pravcem sever–jug. Rover se nalazi sa severne strane planine Šarp, koja se nalazi u centru kratera. Ako se ide logikom da padine planine utiču na pravac vetra, onda bi pravac trebalo da bude sever–jug, međutim, dominantni su vetrovi iz pravca istok–zapad. Uzvišeni obod kratera je mogući uzrok za ovakvo kretanje. Podaci o atmosferskom pritisku REMS instrumenta pokazuju sezonski rast kao i dnevni ritam. Ni jedno ni drugo nije očekivano, ali pomaže naučnicima da razumeju atmosferske cikluse na današnjem Marsu, što može pomoći u proceni atmosferskih uslova koji su nekada vladali na površini planete.
Sezonsko povećanje vazdušnog pritiska nastaje zbog uticaja ugljen-dioksida koji je bio zamrznut u južnoj polarnoj ledenoj kapi tokom zime, pa se tokom prelaska iz proleća u leto na južnoj polulopti oslobađa u atmosferu. Dnevni ciklus povišenog pritiska u jutarnjim i sniženog pritiska u večernjim satima nastaje zbog zagrevanja atmosfere sunčevom energijom. Sa kretanjem površine planete od istoka ka zapadu, zajedno sa njom se kreće i talas zagrejane, proširene atmosfere, poznat kao toplotna plima. Efekti te toplotne plime se pojavljuju i u podacima instrumenta RAD. Ovaj instrument prati visokoenergetsko zračenje koje predstavlja zdravstveni rizik za kosmonaute, i ima uticaj na to da li mikrobi mogu da opstanu na površini Marsa.[133]
Sol 100:Kjuriositi je ponovo u pokretu, nakon nekoliko nedelja ispitivanja na lokaciji Roknest. Prvo je izvršena mala vožnja, 1,9 metara, da bi kamen nazvan „Roknest 3“ bio u dometu robotske ruke. Ovaj kamen je sol kasnije ispitan instrumentom APXS, izvršena su dva desetominutna očitavanja o sastavu hemijskih elemenata unutar kamena. Nakon toga, rover je skladištio ruku u neutralni položaj i odvezao se 25,3 metra u pravcu istoka, ka uzvišenju Point lejk (engl.Point Lake). Ovo je prvi put da je rover izvršio analizu nekim instrumentom i vožnju u istom danu. U predstojećoj pauzi, tokom Dana zahvalnosti, Kjuriositi će pomoću kamere Mastcam sa ovog uzvišenja osmotriti teren ka istoku u potrazi za lokacijama za istraživanje i povoljnim rutama za vožnju. Prioritet je pronalaženje pogodnog kamena na kojem će se prvi put upotrebiti bušilica, koja će usitniti stenu i prikupiti usitnjene uzorke iz njene unutrašnjosti. Iako je rover napustio lokaciju Roknest, peti i poslednji uzorak tla koji je sakupljen još uvek se nalazi u unutrašnjosti rovera. Ovaj uzorak se čuva kako bi, ako za to bude potrebe, mogao kasnije da bude analiziran drugim instrumentima rovera.[134]
Globalni snimak Marsa kamerom MCI, 18.11.2012. Belim strelicama je oivičena peščana oluja u južnoj polulopti. Označena su i mesta na kojima se nalaze roveri Oportjuniti i Kjuriositi.
Peščana oluja, koju letelica Orbitalni istraživač Marsa prati od prošle nedelje, prouzrokovala je promene u atmosferi koje su detektovali i roveri na površini planete. Orbiter je pomoću kamere MARCI počeo da prati oluju od 10. novembra po zemaljskom vremenu. Oluja je prišla na 1.347 kilometara od rovera Oportjuniti, uzrokujući veoma malo smanjenje prozirnosti atmosfere iznad rovera, koji ne poseduje sopstvenu meteorološku stanicu. Na drugoj strani planete, rover Kjuriositi je svojim instrumentima izmerio promene u atmosferi uzrokovane olujom. Senzori instrumenta REMS, koji je konstruisan u Španiji i dostavljen u JPL na ugradnju pre lansiranja, uočili su pad u atmosferskom pritisku i blago povišenje noćne temperature. Godina na Marsu traje dve zemaljske godine. Regionalne peščane oluje širile su se i uticale na celu planetu tokom 2001. i 2007. godine, ali se od tada nisu pojavljivale. Nakon decenija proučavanja Marsa, naučnici znaju da postoji obrazac po kojem se ove peščane oluje pojavljuju. Sezona peščanih oluja je počela pre samo par nedelja, sa početkom proleća u južnoj polulopti. Počevši od 16. novembra, instrument MCS je zabeležio povišenje temperature atmosfere na visini od 25 kilometara iznad oluje. Od tada, temperatura u tom regionu se povećala za 25 °C. Ovo se dešava zato što prašina upija zrake sunca na toj visini, što ukazuje da se prašina diže na velike visine i stvara uslove nalik magli od prašine iznad velikog područja. Osim naučnog značaja i razumevanja ponašanja oluje, njeno nadgledanje je veoma važno za rovere koji se nalaze na površini planete. U slučaju da oluja postane globalna, najgore bi prošao rover Oportjuniti. Povećana koncentracija prašine u atmosferi zaklanja Sunce, ali se takođe taloži na solarne panele koji napajaju rover, i samim tim ugrožava njegovo funkcionisanje. Kjuriositi se napaja radioizotopnim termoelektričnim generatorom, a ne solarnim panelima, tako da ne bi bilo velikog uticaja na operacije rovera, osim blagog povišenja radne temperature.[135]
Sol 107: Rover Kjuriositi je započeo svoje epsko putovanje ka Marsu 26. novembra 2011. godine, lansiranjem iz svemirskog centra Kenedi na Floridi. Godinu dana nakon lansiranja i 16 nedelja nakon dramatičnog sletanja u Gejl krater, Kjuriositi je poslao 23.000 fotografija, prešao 517 metara po prašnjavoj površini Marsa i analizom tla i okoline pomogao naučnicima da bolje razumeju ekološku istoriju regiona. Kjuriositi se trenutno nalazi na lokaciji Point lejk, osmatra teren ka istoku gde će izabrati pogodan kamen za prvu analizu bušilicom robotske ruke.[136] Peščana oluja koju letelica MRO nadgleda iz orbite polako jenjava. Za razliku od prethodnih oluja koje su praćene orbiterima u prethodnoj deceniji, ova oluja se nije pretvorila u globalnu. Po prvi put u istoriji istraživanja Marsa razvoj oluje je praćen iz orbite i sa površine, uz pomoć instrumenata za nadgledanje atmosferskih uslova koje poseduje rover Kjuriositi. Naučnici se nadaju da će velika količina podataka koja je prikupljena razjasniti zašto se ova oluja nije pretvorila u globalnu, a samim tim pomoći u prognozi oluja koje će se formirati u budućnosti.[137]
Sol 108–130:
Na slici, koju je snimila letelica MRO, vidi se kretanje rovera od sletanja na Mars do 130. sola misije. Uveličani deo detaljnije prikazuje kuda se rover kretao tokom poslednjih par nedelja.
Rover je tokom 10. decembra po zemaljskom vremenu, u prepodnevnim časovima, prešao 19 metara i stigao do mesta gde je teren niži u odnosu na mesto sletanja. Ova oblast je nazvana Jelounajf bej (engl.Yellowknife Bay), i naučnici će na ovoj lokaciji odrediti pogodnu stenu na kojoj će prvi put upotrebiti bušilicu koja se nalazi na robotskoj ruci rovera. Ovo je bio četvrti uzastopni sol vožnje za Kjuriositi, od kada je napustio lokaciju Roknest na kojoj je proveo prethodni mesec. Tokom ova četiri sola, rover je ukupno prešao 79 m i time je ukupan pređeni put od sletanja dostigao 598 metara. Na putanji rovera se našla stena nazvana Šejler (engl.Shaler), koju je rover ispitao pomoću instrumenata ChemCam i Mastcam, kako bi naučnici utvrdili njen hemijski sastav i detaljnije proučili spoljašnju slojevitu strukturu. Kjuriositi je poslednju od četiri vožnje završio 30% kraće, jer proračuni nagiba rovera nisu bili usaglašeni. Ovo nije predstavljalo veliki problem, ali je softver intervenisao i dao komandu roveru da se zaustavi radi sigurnosti. Inženjeri su pojasnili da se rover do sada kretao po relativno ravnom terenu, tako da nije bilo većih nagiba na kojima bi se javila razlika u proračunatom nagibu, ali je dobro što je rover odmah reagovao tako da softver može da se prilagodi neravnom terenu koji će se sretati i ubuduće.[138]
Sol 130–147:Kjuriositi istražuje oblast Jelounajf bej u potrazi za prvom stenom na kojoj će upotrebiti svoju vibracionu bušilicu. Upotreba bušilice za prikupljanje uzoraka iz unutrašnjosti stene, podvig koji nikada ranije nije pokušan na Marsu, je primarni cilj naučnika za početak 2013. godine. Teren na lokaciji Jelounajf bej je drugačiji od terena po kojem se rover kretao od sletanja na Mars, 6. avgusta2012. godine. Teren na kojem se rover sada nalazi je jedan od tri tipa terena koji se ukrštaju na lokaciji Glenelg, koja je bila usputna stanica na putu ka Jelounajf beju. Kjuriositi je stigao do oboda ove depresije vožnjom dugom 14 m, tokom 11. decembra. Sledećeg sola, vožnjom od 26,1 m, rover je uveliko zašao u basen. Naučnici su usput maksimalno koristili instrumente Mastcam i ChemCam, kako bi ispitali okolne stene. Zatim je 14. decembra, vožnjom od 32,8 m, prišao stenama koje su naučnici hteli detaljnije da ispitaju, a nazvane su Kostelo (engl.Costello) i Flaerti (engl.Flaherty).
Kamera MAHLI je snimila upotrebu alata za uklanjanje prašine sa udaljenosti od oko 25 cm.
Kjuriositi je ispitao ove stene pomoću instrumenata koji se nalaze na vrhu robotske ruke, APXS i MAHLI. Po završetku tih ispitivanja, rover je nastavio dublje unutar basena vožnjom od 5,6 m. Ovom vožnjom je ukupan pređeni put od sletanja dostigao 677 metara. Planirana je još samo jedna vožnja, pre odlaska tima na odmor tokom Božića i Nove godine. Rover će nastaviti da istražuje okolinu sa mesta na kojem će se naći nakon te poslednje vožnje. Pomoću svih kamera prikupiće detaljne snimke okruženja kako bi naučnici lakše odabrali sledeće stene za ispitivanje. Plan je da se veći deo 2013. godine provede u vožnji ka primarnoj lokaciji za istraživanje, planini Šarp, udaljenoj oko 5 kilometara.[139]
Sol 150:Kjuriositi je po prvi put upotrebio svoj alat za uklanjanje prašine (engl.Dust Removal Tool) sa površine stene. Alat se sastoji od motorizovane čeličnečetke i njegov zadatak je da pripremi površinu stene za analizu drugim instrumentima. Alat se nalazi na vrhu robotske ruke rovera. Spektrometar alfa-čestica X zraka i kamera robotske ruke, instrumenti koji se takođe nalaze na robotskoj ruci, imaju najviše koristi od ovog alata jer mogu da prikupe podatke koje ne bi mogli da je stena prekrivena slojem prašine. Stena je dobila naziv Ekvir_1 (engl.Ekwir_1).[140]
Sol 165:Kjuriositi je po prvi put upotrebio kameru robotske ruke (MAHLI) za snimanje fotografija tokom noći, uz pomoć običnog i ultraljubičastog osvetljenja. Naučnici su upotrebili kameru za ispitivanje stene nazvane Sajunej (engl.Sayunei), koja se nalazi na mestu kuda je prošao prednji levi točak rovera i usitnio materijal, tako da je otkriven unutrašnji sloj stene. Slike su snimljene 22. januara, a na Zemlju su stigle 23. januara. MAHLI, kamera u boji sa adaptivnim fokusom, ima sopstvene izvore svetlosti – LED diode (engl.Light-emiting diode). Ultraljubičasta svetlost je korišćena jer se pomoću nje mogu videti fluorescentni minerali.[141]
Ovaj grafik pokazuje procentualnu raspodelu gasova u atmosferi Marsa, izmerenu kvadrupolnim masenim spektrometrom. Najzastupljeniji je ugljen-dioksid koji čini 95,9% atmosfere.
Kamen Roknest 3 slikan kamerom MastCam 59. dana misije. Dug je oko 40 cm i visok oko 10 cm.
Ova fotografija kamena Roknest 3 kombinuje dve slike snimljene ChemCam instrumentom (uokvireno na prethodnoj slici). Istaknuto je pet tačaka na koje je ispaljen laser da bi se proverio sastav stene.
Slika stene Ekvir_1, koju je kamera MAHLI snimila sa udaljenosti od samo 1 cm, nakon upotrebe alata za uklanjanje prašine.
^Alan Buis/Carolina Martinez (27. 5. 2009). „NASA Selects Student's Entry as New Mars Rover Name” (na jeziku: (jezik: engleski)). NASA. Arhivirano iz originala 28. 01. 2012. g. Pristupljeno 11. 2. 2012. „NASA izabrala ime rovera na osnovu predloga učenika”CS1 održavanje: Neprepoznat jezik (veza)
^„Mars science laboratory: Mission” (na jeziku: (jezik: engleski)). JPL. Arhivirano iz originala 10. 07. 2011. g. Pristupljeno 11. 2. 2012. „Misija marsove naučne laboratorije”CS1 održavanje: Neprepoznat jezik (veza)
^„Mars Science Laboratory/Curiosity” (na jeziku: (jezik: engleski)). NASA. Arhivirano iz originala 21. 2. 2011. g. Pristupljeno 14. 2. 2012. „Marsova naučna laboratorija/Kjuriositi”CS1 održavanje: Neprepoznat jezik (veza)
^Watson, Traci (14. 4. 2008). „Troubles parallel ambitions in NASA Mars project” (na jeziku: (jezik: engleski)). USA TODAY. Pristupljeno 14. 2. 2012. „Problemi paralelno sa ambicijama marsove naučne laboratorije”CS1 održavanje: Neprepoznat jezik (veza)
^„Keeping it Cool (…or Warm!)” (na jeziku: (jezik: engleski)). NASA. 12. 9. 2008. Arhivirano iz originala 24. 12. 2010. g. Pristupljeno 14. 2. 2012. „Sistem grejanja/hlađenja”CS1 održavanje: Neprepoznat jezik (veza)
^„The rover's "brains"” (na jeziku: (jezik: engleski)). JPL. Pristupljeno 14. 2. 2012. „Mozak rovera”CS1 održavanje: Neprepoznat jezik (veza)
^„RAD750® FAMILY OF PRODUCTS” (na jeziku: (jezik: engleski)). BAE Systems. Arhivirano iz originala 14. 8. 2012. g. Pristupljeno 14. 2. 2012. „Porodica procesora RAD750”CS1 održavanje: Neprepoznat jezik (veza)
^Cady, Anne (januar 2002). „RAD750 System Flight Computer”(PDF) (na jeziku: (jezik: engleski)). JPL. Arhivirano iz originala(pdf) 5. 3. 2016. g. Pristupljeno 13. 10. 2012. „RAD750 procesor”CS1 održavanje: Neprepoznat jezik (veza)
^Andre Makovsky & Taylor, Jim (novembar 2009). „Mars Science Laboratory Telecomunications System Design”(PDF) (na jeziku: (jezik: engleski)). JPL. Arhivirano iz originala(pdf) 28. 02. 2013. g. Pristupljeno 13. 10. 2012. „Telekomunikacioni sistem rovera”Pronađeni su suvišni parametri: |author2= i |last2= (pomoć)CS1 održavanje: Neprepoznat jezik (veza)
^„Mars earth distance” (na jeziku: (jezik: engleski)). WolframAlpha. Pristupljeno 13. 10. 2012. „Trenutna udaljenost Zemlje od Marsa”CS1 održavanje: Neprepoznat jezik (veza)
^„New Mars Rover to Feature Morse Code” (na jeziku: (jezik: engleski)). ARRL. 23. 3. 2011. Pristupljeno 14. 2. 2012. „Morzeova azbuka na roveru”CS1 održavanje: Neprepoznat jezik (veza)
^Malin, Michael C. „Mast Camera (Mastcam)” (na jeziku: (jezik: engleski)). JPL. Arhivirano iz originala 08. 08. 2012. g. Pristupljeno 23. 2. 2012. „Stubna kamera”CS1 održavanje: Neprepoznat jezik (veza)
^Edgett, Kenneth S. „Mars Hand Lens Imager (MAHLI)” (na jeziku: (jezik: engleski)). Arhivirano iz originala 15. 08. 2012. g. Pristupljeno 23. 2. 2012. „Kamera robotske ruke”CS1 održavanje: Neprepoznat jezik (veza)
^Malin, Michael C. „Mars Descent Imager (MARDI)” (na jeziku: (jezik: engleski)). Arhivirano iz originala 07. 08. 2012. g. Pristupljeno 23. 2. 2012. „Kamera za slikanje pri sletanju”CS1 održavanje: Neprepoznat jezik (veza)
^„Mastcam Instrument Description” (na jeziku: (jezik: engleski)). Malin Space Science Systems. Pristupljeno 23. 2. 2012. „Opis instrumenta MastCam”CS1 održavanje: Neprepoznat jezik (veza)
^McCarthy, Erin (30. 8. 2010). „James Cameron Designs 3D Camera for Mars Rover” (na jeziku: (jezik: engleski)). popularmechanics.com. Pristupljeno 23. 2. 2012. „Džejms Kameron učestvovao u kreiranju kamera”CS1 održavanje: Neprepoznat jezik (veza)
^David, Leonard (28. 3. 2011). „NASA Nixes 3-D Camera for Next Mars Rover” (na jeziku: (jezik: engleski)). SPACE.com. Pristupljeno 24. 2. 2012. „Neće biti 3D kamere na roveru”CS1 održavanje: Neprepoznat jezik (veza)
^Wiens, Roger C. „Chemistry & Camera (ChemCam)” (na jeziku: (jezik: engleski)). JPL. Arhivirano iz originala 20. 07. 2011. g. Pristupljeno 26. 2. 2012. „Hemijska kamera”CS1 održavanje: Neprepoznat jezik (veza)
^„MSL ChemCam on Mars” (na jeziku: (jezik: engleski)). JPL. Pristupljeno 26. 2. 2012.CS1 održavanje: Neprepoznat jezik (veza)
^ abvWiens, Roger C. „Chemistry & Camera (ChemCam)” (na jeziku: (jezik: engleski)). Arhivirano iz originala 20. 07. 2011. g. Pristupljeno 26. 2. 2012. „Hemijska kamera”CS1 održavanje: Neprepoznat jezik (veza)
^„ChemCam fact sheet”(PDF) (na jeziku: (jezik: engleski)). lanl.gov. jul 2004. Arhivirano iz originala(pdf) 08. 02. 2012. g. Pristupljeno 26. 2. 2012. „Karakteristike hemijske kamere”CS1 održavanje: Neprepoznat jezik (veza)
^„ChemCam Status” (na jeziku: (jezik: engleski)). LOS ALAMOS NATIONAL LABORATORY. August, 2010. Arhivirano iz originala 09. 11. 2013. g. Pristupljeno 26. 2. 2012. „Status hemijske kamere”Proverite vrednost paramet(a)ra za datum: |date= (pomoć)CS1 održavanje: Neprepoznat jezik (veza)
^ abvgMahaffy, Paul. „Sample Analysis at Mars (SAM)” (na jeziku: (jezik: engleski)). JPL. Arhivirano iz originala 20. 07. 2011. g. Pristupljeno 26. 2. 2012. „Analiza uzoraka na Marsu”CS1 održavanje: Neprepoznat jezik (veza)
^„Sample Analysis at Mars” (na jeziku: (jezik: engleski)). Godard spejs flajt centar. Pristupljeno 26. 2. 2012. „Analiza uzoraka na Marsu”CS1 održavanje: Neprepoznat jezik (veza)
^„SAM: An International Effort” (na jeziku: (jezik: engleski)). Godard spejs flajt centar. Pristupljeno 26. 2. 2012. „Međunarodna saradnja na konstrukciji instrumenta”CS1 održavanje: Neprepoznat jezik (veza)
^Tenenbaum, David (6. 9. 2008). „Making Sense of Mars Methane” (na jeziku: (jezik: engleski)). astrobio.net. Pristupljeno 26. 2. 2012. „Shvatanje metana na Marsu”CS1 održavanje: Neprepoznat jezik (veza)
^Mitrofanov, Igor. „Dynamic Albedo of Neutrons (DAN)” (na jeziku: (jezik: engleski)). JPL. Arhivirano iz originala 20. 07. 2011. g. Pristupljeno 22. 2. 2012. „Dinamički albedo neutrona”CS1 održavanje: Neprepoznat jezik (veza)
^ abJavier Gómez-Elvira. „Rover Environmental Monitoring Station (REMS)” (na jeziku: (jezik: engleski)). JPL. Arhivirano iz originala 20. 07. 2011. g. Pristupljeno 23. 2. 2012. „Stanica za praćenje roverovog okruženja”CS1 održavanje: Neprepoznat jezik (veza)
^ abv„Eyes and Other Senses” (na jeziku: (jezik: engleski)). JPL. Pristupljeno 22. 2. 2012. „Oči rovera i druga čula”CS1 održavanje: Neprepoznat jezik (veza)
^„Launch Vehicle” (na jeziku: (jezik: engleski)). JPL. Arhivirano iz originala 24. 05. 2011. g. Pristupljeno 20. 2. 2012. „Detalji o raketi nosaču”CS1 održavanje: Neprepoznat jezik (veza)
^Amos, Jonathan (22. 7. 2011). „Mars rover aims for deep crater” (na jeziku: (jezik: engleski)). BBC News. Pristupljeno 28. 2. 2012.CS1 održavanje: Neprepoznat jezik (veza)
^„MSL — Landing Sites Workshop” (Microsoft Word)|format= zahteva |url= (pomoć). 15. 7. 2008.|contribution= ignorisan (pomoć)CS1 održavanje: Datum i godina (veza)
^Grant, John & Golombek, Matt (12. 6. 2006). „MSL Workshop Summary”(pdf) (na jeziku: (jezik: engleski)). Pristupljeno 1. 3. 2012.CS1 održavanje: Neprepoznat jezik (veza)
^„MSL Landing Site Selection”(pdf) (na jeziku: (jezik: engleski)). Jet Propulsion Laboratory. Pristupljeno 1. 3. 2012. „Izbor mesta za sletanje”CS1 održavanje: Neprepoznat jezik (veza)
^Grant, John & Golombek, Matt (oktobar 23 — October 25, 2007). „SECOND LANDING SITE WORKSHOP FOR THE 2009 MARS SCIENCE LABORATORY” (na jeziku: (jezik: engleski)). nasa.gov. Pristupljeno 1. 3. 2012. „Druga radna grupa za izbor mesta sletanja”Proverite vrednost paramet(a)ra za datum: |date= (pomoć)CS1 održavanje: Neprepoznat jezik (veza)
^„MSL Workshop Voting Chart”(pdf) (na jeziku: (jezik: engleski)). Pristupljeno 1. 3. 2012. „Tabela glasova”CS1 održavanje: Neprepoznat jezik (veza)
^„Site List Narrows For NASA's Next Mars Landing” (na jeziku: (jezik: engleski)). marstoday.com. 19. 11. 2008. Arhivirano iz originala 27. 11. 2008. g. Pristupljeno 1. 3. 2012. „Sužen izbor potencijalnih lokacija za sletanje”CS1 održavanje: Neprepoznat jezik (veza)
^„Current MSL Landing Sites” (na jeziku: (jezik: engleski)). Arhivirano iz originala 15. 3. 2012. g. Pristupljeno 1. 3. 2012. „Trenutan izbor mesta za sletanje”CS1 održavanje: Neprepoznat jezik (veza)
^„Final 7 Prospective Landing Sites” (na jeziku: (jezik: engleski)). NASA. Arhivirano iz originala 13. 04. 2011. g. Pristupljeno 1. 3. 2012. „žizbor sužen na sedam lokacija”CS1 održavanje: Neprepoznat jezik (veza)
^ abWebster, Guy; Brown, Dwayne (22. 7. 2011). „NASA's Next Mars Rover to Land at Gale Crater” (na jeziku: (jezik: engleski)). JPL. Arhivirano iz originala 07. 06. 2012. g. Pristupljeno 1. 3. 2012. „Izabrana lokacija za sletanje”CS1 održavanje: Neprepoznat jezik (veza)
^ abChow, Denise (22. 7. 2011). „NASA's Next Mars Rover to Land at Huge Gale Crater” (na jeziku: (jezik: engleski)). SPACE.com. Pristupljeno 1. 3. 2012. „Rover će sleteti u ogroman Gejl krater”CS1 održavanje: Neprepoznat jezik (veza)
^ abAmos, Jonathan (22. 7. 2011). „Mars rover aims for deep crater” (na jeziku: (jezik: engleski)). BBC News. Pristupljeno 1. 3. 2012. „Rover cilja veliki krater”CS1 održavanje: Neprepoznat jezik (veza)
^Greicius, Tony (10. 11. 2011). „Canyons on Mountain Inside Gale Crater” (na jeziku: (jezik: engleski)). NASA. Arhivirano iz originala 01. 09. 2021. g. Pristupljeno 2. 3. 2012.CS1 održavanje: Neprepoznat jezik (veza)
^Webster, Guy; Cole, Steve; Brown, Dwayne (20. 8. 2012). „Curiosity Stretches its Arm” (na jeziku: (jezik: engleski)). Laboratorija za mlazni pogon. Arhivirano iz originala 23. 08. 2012. g. Pristupljeno 20. 8. 2012. „Kjuriositi je „ispružio“ svoju robotsku ruku”CS1 održavanje: Neprepoznat jezik (veza)
^Webster, Guy; Cole, Steve; Brown, Dwayne (31. 8. 2012). „Curiosity Has a Photo Day” (na jeziku: (jezik: engleski)). Laboratorija za mlazni pogon. Arhivirano iz originala 03. 09. 2012. g. Pristupljeno 31. 8. 2012. „Dan za fotografisanje površine”CS1 održavanje: Neprepoznat jezik (veza)
^Webster, Guy; Cole, Steve; Brown, Dwayne (13. 9. 2012). „Sample-Handling Gear Gets a Buzz” (na jeziku: (jezik: engleski)). Laboratorija za mlazni pogon. Arhivirano iz originala 04. 10. 2012. g. Pristupljeno 13. 9. 2012. „Završen test opreme za ispitivanje uzoraka”CS1 održavanje: Neprepoznat jezik (veza)
^Webster, Guy; Cole, Steve; Brown, Dwayne (18. 9. 2012). „Driving and Moon-Watching” (na jeziku: (jezik: engleski)). Laboratorija za mlazni pogon. Arhivirano iz originala 04. 10. 2012. g. Pristupljeno 18. 9. 2012. „Nastavak vožnje uz kratku pauzu za posmatranje Marsovih meseca”CS1 održavanje: Neprepoznat jezik (veza)
^Webster, Guy; Cole, Steve; Brown, Dwayne (25. 9. 2012). „Continuing Toward Glenelg” (na jeziku: (jezik: engleski)). Laboratorija za mlazni pogon. Arhivirano iz originala 04. 10. 2012. g. Pristupljeno 25. 9. 2012. „Rover nastavlja put ka lokaciji Glenelg”CS1 održavanje: Neprepoznat jezik (veza)
^Webster, Guy; Cole, Steve; Brown, Dwayne (26. 9. 2012). „Longest Drive Yet” (na jeziku: (jezik: engleski)). Laboratorija za mlazni pogon. Arhivirano iz originala 04. 10. 2012. g. Pristupljeno 26. 9. 2012. „Najduža vožnja do sada”CS1 održavanje: Neprepoznat jezik (veza)
^Webster, Guy; Cole, Steve; Brown, Dwayne (2. 10. 2012). „From 'Bathurst Inlet' to 'Rocknest'” (na jeziku: (jezik: engleski)). Laboratorija za mlazni pogon. Arhivirano iz originala 04. 10. 2012. g. Pristupljeno 2. 10. 2012. „Rover se premestio na novu lokaciju nazvanu Roknest”CS1 održavanje: Neprepoznat jezik (veza)
^Webster, Guy; Cole, Steve; Brown, Dwayne (3. 10. 2012). „Approach to Ripple” (na jeziku: (jezik: engleski)). Laboratorija za mlazni pogon. Arhivirano iz originala 05. 10. 2012. g. Pristupljeno 3. 10. 2012. „Prilaz nanosu peska”CS1 održavanje: Neprepoznat jezik (veza)





 Na slici se vide tipovi tri generacije rovera koji su poslati na Mars.
Na slici se vide tipovi tri generacije rovera koji su poslati na Mars. Poređenje točkova: Sodžurner, Mars eksplorejšn roveri, Marsova naučna laboratorija.
Poređenje točkova: Sodžurner, Mars eksplorejšn roveri, Marsova naučna laboratorija. Rover tokom testova mobilnosti. Na točkovima se može videti šablon JPL u Morzeovoj azbuci.
Rover tokom testova mobilnosti. Na točkovima se može videti šablon JPL u Morzeovoj azbuci. Soba u kojoj se sklapao rover.
Soba u kojoj se sklapao rover. Testiranje prelaska preko prepreka.
Testiranje prelaska preko prepreka. Punjenje MMRTG-a marsove naučne laboratorije.
Punjenje MMRTG-a marsove naučne laboratorije.







.jpg)

.jpg)
.jpg)

















.gif)

.gif)



.jpg)

























 Ostaci isušenog rečnog korita na Marsu.
Ostaci isušenog rečnog korita na Marsu.










_-_Flickr_-_NASA_Goddard_Photo_and_Video.jpg)




















